eVTOLs will be key in the Urban Air Mobility industry. There are many projects under development and various types of eVTOLs used to carry out different tasks. eVTOLs are aircraft with vertical take-off and landing capabilities thanks to their propulsion systems. Most eVTOLs have one propulsion system for vertical and one for horizontal movement, and many of them have the same propulsion system with a modified orientation.
There are different classifications of eVTOLs: according to their power supply, the arrangement of their engines or even the type of piloting they perform.
What technologies do the different types of eVTOLs employ?
Power Source:
All eVTOLs (e for electric) use electric power to propel themselves, but some are hybrids. Hybrid eVTOLs, such as Odys Aviation’s eVTOL, generate power with a combustion engine, but propulsion is still electric.
Many eVTOLs are fully electric and run on batteries that power the thrusters. The most widespread are lithium-ion batteries, which can reach around 60-80 Wh/kg, which considerably limits the performance and route length that an electric vehicle can cover. However, their evolution is promising and better performance is expected in the medium term.
On the other hand, another promising power source is the hydrogen fuel cell, with a ratio of 500 – 600 Wh/Kg and much higher performance. However, this technology is still at an early stage of development.
Depending on the type of eVTOL, each type of power supply has its pros and cons, but both can be useful for different uses. Electric vehicles can be used to make small, quiet aircraft that can be used as UAM (Urban Air Mobility) at lower altitudes, such as the “Doroni H1”. Hybrid VTOLs are more useful for long-haul flights or for carrying heavier loads.
Aircraft Design:
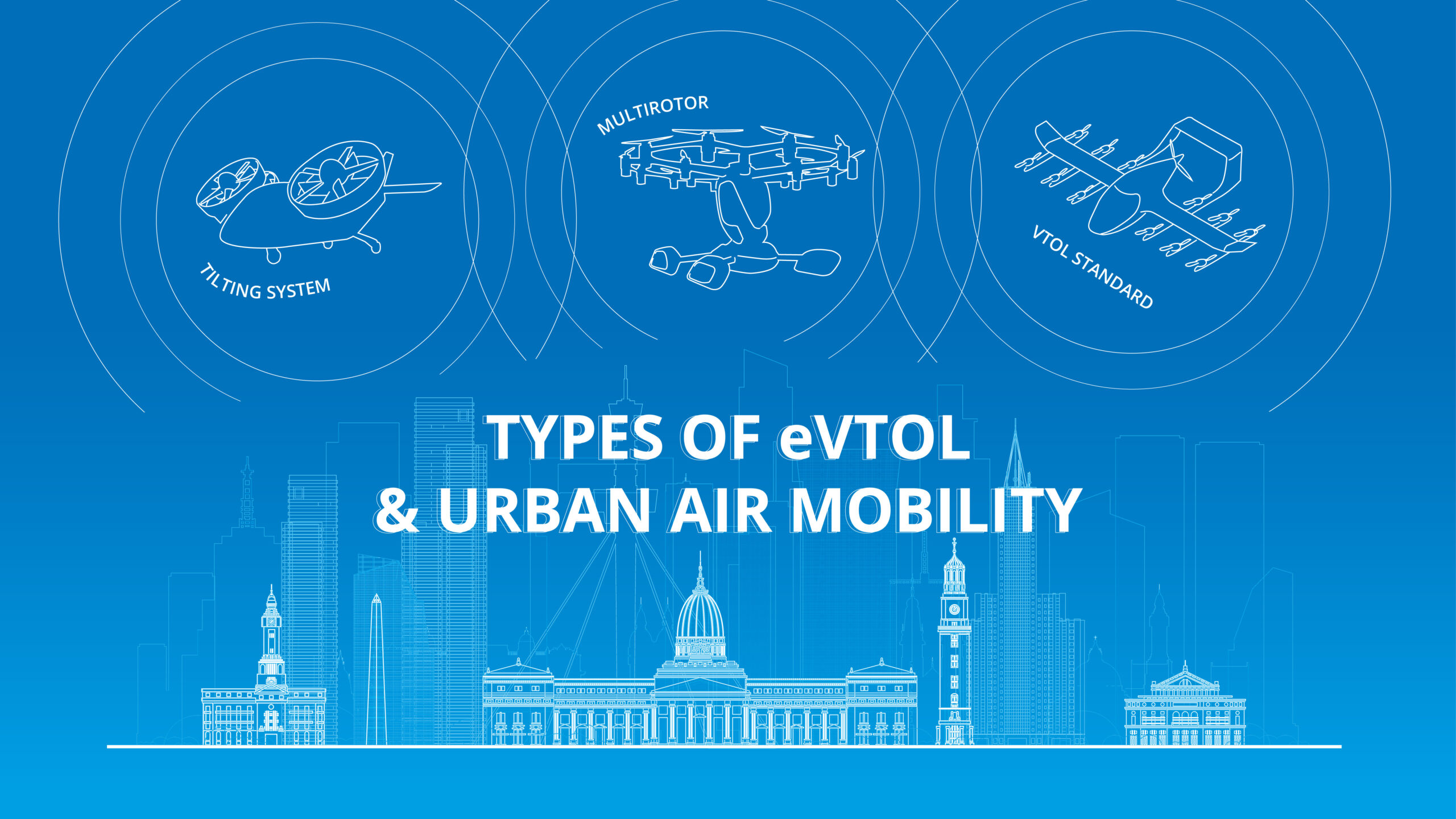
Multirotor
Multirotor eVTOLs have no or very small wings. They use propellers or downward thrusters to propel themselves and base their manoeuvres on the change of revolutions of one or more rotors. Many eVTOL manufacturers such as Lift Aircraft with “Hexa”, Rotor X with the “RX eTransporter” or SkyDrive with “SD-03”, have opted for this arrangement, focusing on a niche market where the movements are not over long distances, but which, due to the complexity of the urban environment, require precision positioning.
Tilt system
When we talk about the type of eVTOL with tilting system the tilt-rotor design is like a lift-and-cruise aircraft but with a movable rotor. This can be done in two ways: by making the rotors tilt (tilt-prop) or by making the whole wing movable (tilt-wing). These eVTOLs take off vertically with their thrusters facing downwards like multicopters, and then change direction to generate more thrust horizontally. Some eVTOLs with a tilt-wing rotor are the Dufour “Aero 3”, the “Bell Nexus 4EX” and the Lilium jet.
Conventional eVTOL (lift and cruise)
These eVTOLs are the most aircraft-like. They have fixed wings and rotors that allow them to take off vertically and other horizontal rotors to propel them horizontally when in the air. The simplicity of this arrangement, ease of maintenance and optimal cost have made this configuration a favourite among today’s eVTOL manufacturers. Examples of eVTOLs using this design include Vertical Aerospace’s “VX4”, Beta’s “ALIA-250” and Wisk’s “Cora”.
Control System
The control of this type of vehicle can be fully autonomous (controlled from the ground or from the aircraft itself) or it can have an on-board joystick for assisted manual control.
Designed based on DO178C and DO254 quality standards, Embention’s Veronte 4x Redundant Autopilot is fully prepared for certification of any type of eVTOL. The Autopilot 4x has been designed to have no single point of failure, which means that even if one of the cores fails or even in the event of a referee’failure, the eVTOL can still be fully operational with the second or even third core.
In addition, Autopilot 4x can be configured to include fully customised control modes, such as fully autonomous control mode or fly-by-wire mode.
The Future of Mobility with eVTOLs
Electric Vertical Take-Off and Landing aircraft are expected to transform mobility by enabling fast, efficient and sustainable transportation in densely populated areas. Within the Urban Air Mobility ecosystem, eVTOLs will operate from dedicated vertiports strategically located in cities, reducing travel times and congestion on the ground. Their electric propulsion systems significantly reduce noise levels compared to traditional helicopters, making them more suitable for urban integration.
According to developments promoted by Embention, the evolution of avionics, automation and energy storage technologies will be key to enabling safe and scalable operations. Advanced flight control systems, high-reliability autopilots and secure communication links will allow coordinated air traffic management in urban environments. As infrastructure, certification frameworks and public acceptance mature, eVTOLs are expected to play a central role not only in passenger transport but also in logistics, emergency response and regional connectivity.
Key Challenges Facing eVTOL Development
Despite rapid technological progress, several critical challenges must be addressed before eVTOL operations can scale commercially. One of the primary challenges is certification and regulation. Aviation authorities require extremely high safety standards, and demonstrating compliance for novel aircraft architectures demands rigorous testing, redundancy validation and robust system design.
Another major challenge is energy storage and efficiency. Current battery technology limits range and payload capacity, requiring continuous improvements in energy density, charging infrastructure and thermal management. Hydrogen and hybrid solutions present potential alternatives, but they introduce additional complexity in integration and certification.
Finally, airspace integration and operational management remain essential hurdles. Coordinating a large number of autonomous or semi-autonomous aircraft in urban environments requires advanced communication systems, real-time monitoring and reliable detect-and-avoid capabilities. Achieving safe interaction between eVTOLs, traditional aircraft and urban infrastructure will be fundamental for the sustainable deployment of Urban Air Mobility solutions.
Subscribe
Receive news & updates
Latest News
Embention strengthens its POA approval with the integration of Part-IS Information Security Requirements approved by AESA
Embention receives AESA approval to integrate Part-IS into its POA, reinforcing compliance with EU aviation cybersecurity requirements.
As UAS operations continue to evolve, flight safety and airspace control remain essential for every mission. Discover how Veronte OPS enhances operational safety through advanced geocaging capabilities designed for autonomous and complex UAV operations.
To provide the best experiences, we use technologies such as cookies to store and/or access device information. Consenting to these technologies will allow us to process data such as browsing behavior or unique IDs on this site. Not consenting, or withdrawing consent, may adversely affect certain features and functions.
Functional Always active
To provide the best experiences, we use technologies such as cookies to store and/or access device information. Consenting to these technologies will allow us to process data such as browsing behavior or unique IDs on this site. Not consenting, or withdrawing consent, may adversely affect certain features and functions.
Preferencias
Technical storage or access is necessary for the legitimate purpose of storing preferences not requested by the subscriber or user.
Statistics
Technical storage or access that is used exclusively for statistical purposes.Storage or technical access used exclusively for anonymous statistical purposes. Without a request, voluntary compliance by your Internet service provider, or additional records from a third party, information stored or retrieved solely for this purpose cannot be used to identify you.
Marketing
The storage or technical access is necessary to create user profiles to send advertising, or to track the user on a website or multiple websites for similar marketing purposes.