Redundant Arbiters
Redundant Arbiters Configurable Voting
Configurable Voting Distributed Redundancy
Distributed Redundancy Robust to Zonal Failure
Robust to Zonal Failure No Single Point of Failure
No Single Point of Failure
Distributed Redundancy
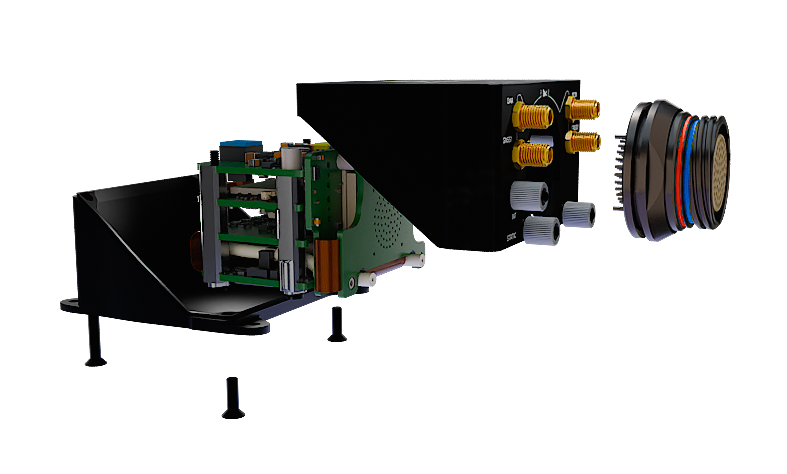
The distributed redundancy in Veronte Autopilot DRx permits the installation of multiple autopilots and management boards located in different areas of the aircraft. It makes it robust to zonal failures. In case of an autopilot or zonal failure other units will handover.