Arbitraje redundante
Arbitraje redundante Algoritmo de votado
Algoritmo de votado Redundancia distribuida
Redundancia distribuida Resistente a fallos zonales
Resistente a fallos zonales Sin un único punto de fallo
Sin un único punto de fallo
Redundancia distribuida
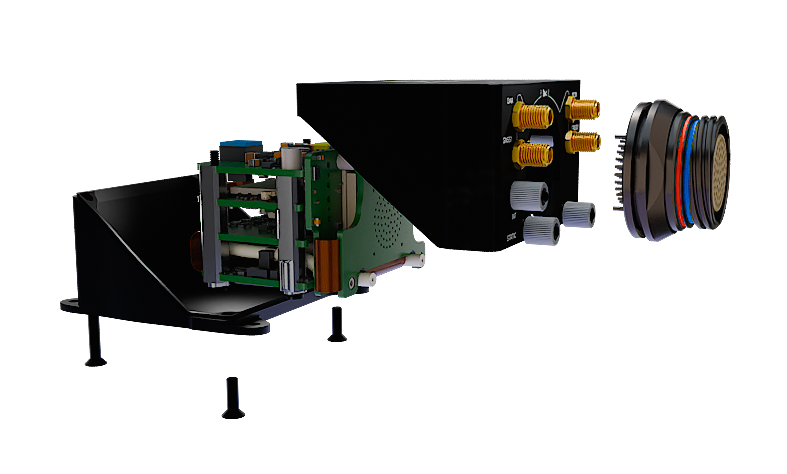
La redundancia distribuida del Autopiloto Veronte DRx permite la instalación de múltiples autopilotos y sistemas de control ubicados en diferentes zonas de la aeronave. Esto lo hace robusto ante fallos zonales. En caso de fallo de un autopiloto o de una zona concreta, otras unidades harán el relevo.