Unmanned Aerial Vehicles (UAVs) are becoming – and will become – more and more common in everyone’s life and will take over existing jobs and create new ones. Onboard cameras, gimbals or function-sensitive mechanisms are some of the multiple devices that these UAVs are and will be equipped with. Not to mention the essential units for autonomously flying as the autopilot, GPS, Electronic Speed Controller (ESC), among many others.
But the heterogeneity of hardware units onboard UAVs arises integration difficulties that penalize their mission and flight capabilities. For example, the inability to integrate a certain camera and having to choose a heavier one will be detrimental for a photogrammetry mission, as well as reducing its flight endurance due to the extra weight.
Controller Area Network (CAN) bus is the desired communication for embedded systems such as UAVs. It is a versatile and high-level of security communication method which allows to save on weight, size and cost of the final UAV.
What is CAN Bus?
CAN is an International Standardization Organization (ISO) defined serial communications bus. It was originally developed for the automotive industry to replace the complex wiring harness with a two-wire (parallel) bus. It is a message-based protocol allowing individual systems, devices and controllers within a network to communicate without the help of a hosting device.
Devices and controllers connected to the CAN Bus can transmit data to the bus and receive data from the bus. A message transmitted by one unit is received by all the units connected to the bus. A data message is transmitted as a frame. In each frame, the message is labeled by an identifier that is unique throughout the network. Each unit will have a filter to accept the message relevant to it.
What sets it apart from the other communication buses?
CAN Bus operates at high-speed (25kbps – 1Mbps), has high immunity to electrical interference and the ability to self-diagnose and repair data errors. Besides, its arbitration technique avoids data collision based on message priority; features leading to CAN’s sharp rise in popularity in recent years.
The advantages it offers compared to other communication protocols are:
- Speed, as it is faster than other buses and also capable of sending multiple messages simultaneously.
- Flexibility, as having less wire facilitates its installation and maintenance.
- Reliability, as it requires very little wiring and is less sensitive to magnetic interference than analog wiring.
- Cost, as it requires less hardware and has minimal signal processing requirements.
CAN Bus in Veronte Autopilots
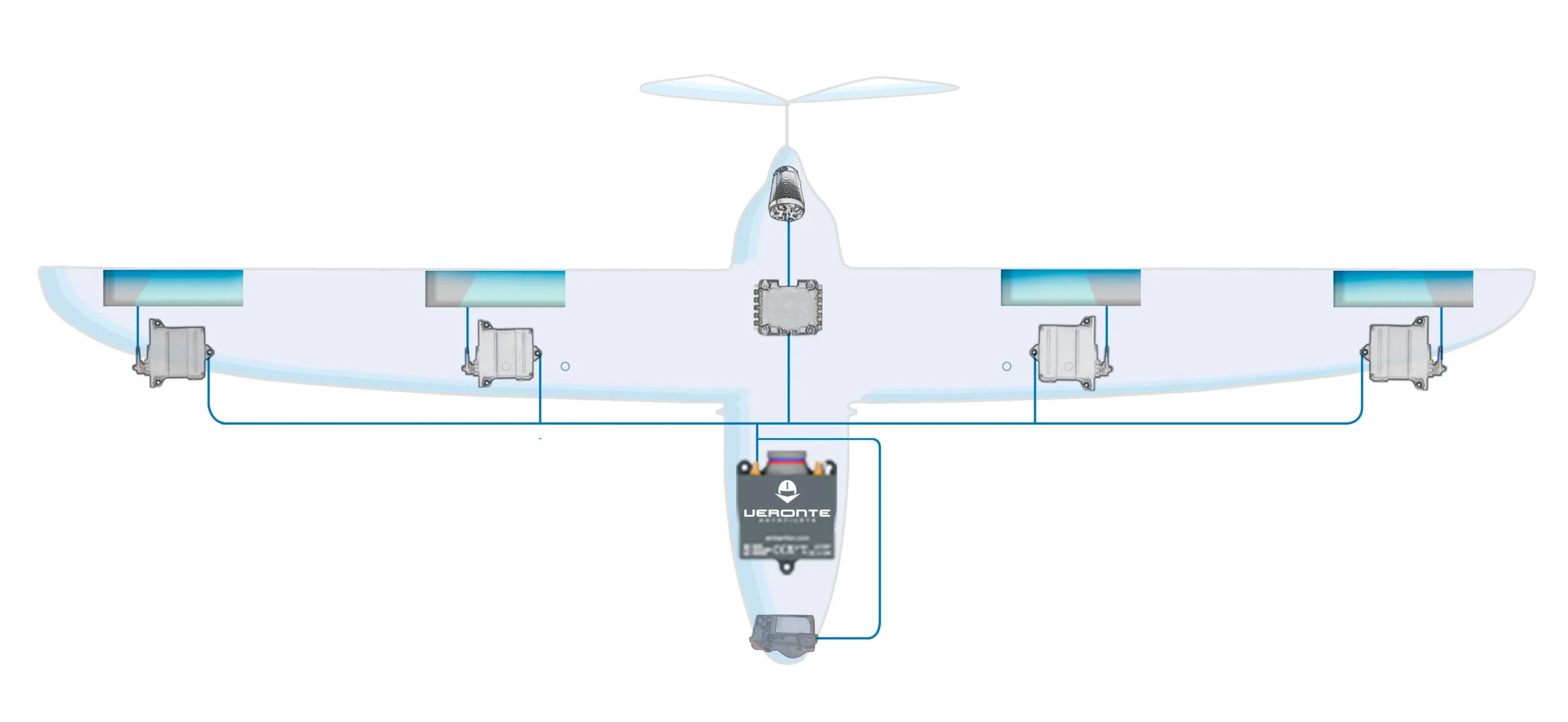
For all these reasons, Veronte Autopilots – both simple and redundant units, are equipped with 2x CAN buses. The latter buses enhance the autopilot’s versatility, as the amount of hardware manufacturers that add CAN Buses to their system is more and more frequent. CAN communication is also essential for our redundant units, as the arbitration of the active governing unit – which simple autopilot is controlling the UAV – is run through the redundant CAN Bus.
The future of CAN Bus
With the UAV industry at full capacity and rapidly expanding, more and more complex systems will appear. Standardizing the way each component communicates with the next will be vital in ensuring compatibility, expandability and installation longevity.
CAN Bus is the communication protocol better suited to make that happen. It is widely used within the car industry, as well as in the aerospace industry: the A380’s control panel data is carried by just two wires to the CAN Bus, replacing 90 odd wires in older types of airplanes. Therefore, it is fair to assume that the future of the UAV industry will be linked to CAN communications.