

Embention Shareholders Letter: Q1 2026 Highlights
Discover the key milestones, strategic developments, and market insights featured in Embention’s Q1 2026 Shareholders Letter.
March 1, 2021
Nowadays, a wide range of unmanned aerial vehicles equip an electric motor. They are very extended due to several reasons: efficiency, minimal size, low weight and rotor inertia, high reliability and long life. On top of that, they need almost no maintenance during its lifecycle.
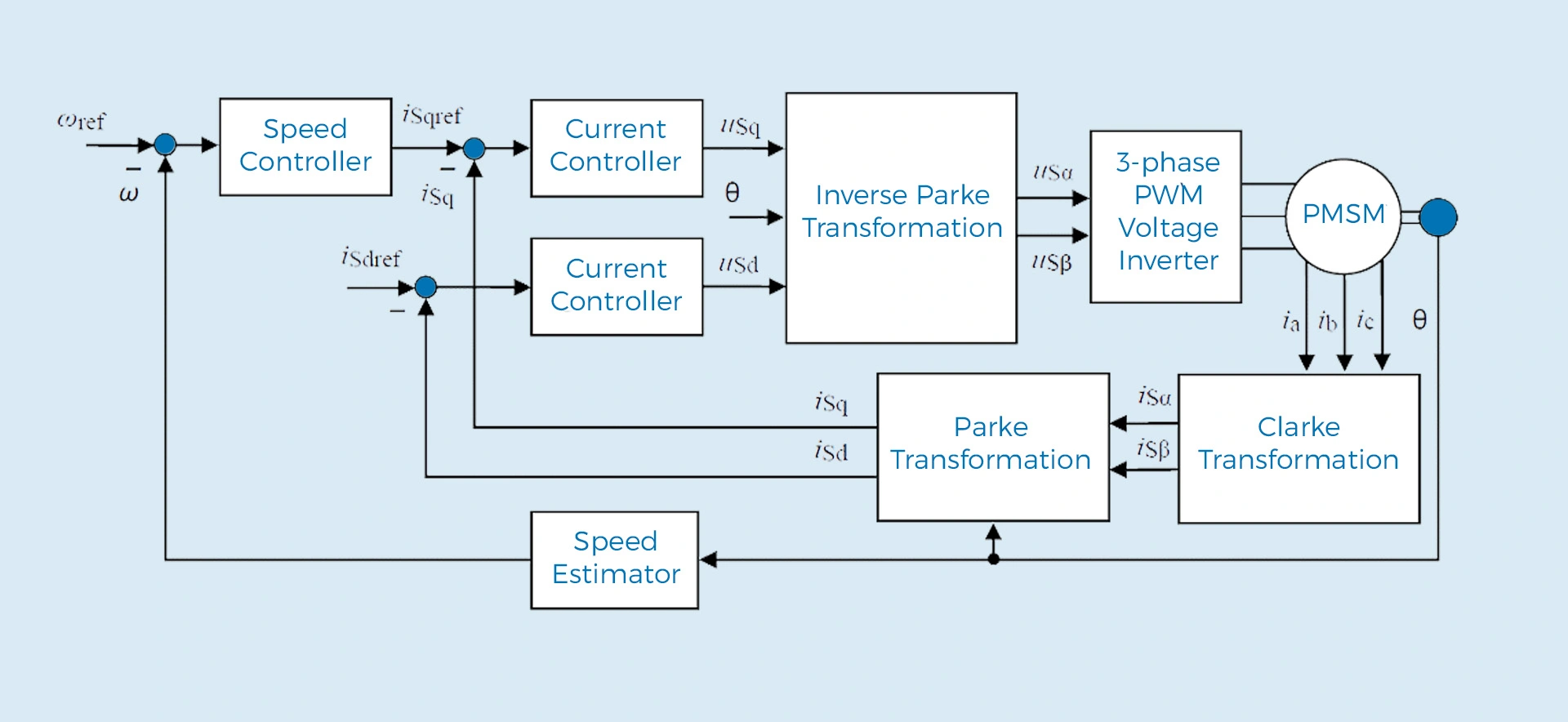
Probably, the most used kind of electric motor is the so-called permanent magnet synchronous motor (PMSM). A PMSM uses permanent magnets embedded in the steel rotor to create a constant magnetic field. The stator carries windings connected to an AC supply to produce a rotating magnetic field. Hence, the key factor is to control this magnetic field in such a way that one could get the best of our energetic resources as well as the most of the motor we have fit in terms of efficiency and power.
So focusing on controlling the magnetic field, the most extended technique is what is called Vector Control. This approach can be divided likewise into three different technologies:
Embention offers its customers the possibility of getting cutting-edge products including the latest implementations of FOC control, DO178B and DO254 compliant. Among these product Embention is proud to introduce the following:
As a key subsystem of your UAS, choosing a motor controller can make the difference in terms of reliability, efficiency and performance. In Embention, we believe that quality is the most important factor to deliver to our customers and that is why we offer a full range of ESC that meet the DO standards and implement the efficient FOC approach.
In addition, we have designed three different options according to the application so all the needs in the market can be covered, because it is great to have the power under our control.

Receive news & updates
Discover the key milestones, strategic developments, and market insights featured in Embention’s Q1 2026 Shareholders Letter.

The aerospace industry is witnessing a shift in the loitering munitions and C-UAS with the emergence of new autopilot systems from Embention

Embention attends XPONENTIAL Europe 2026 in Dusseldorf. Discover the highlights of our presence at Europe’s leading autonomous systems event.