Obtener la información más exacta sobre la posición y actitud del UAV en cualquier parte del mundo y en todas las condiciones climatológicas es un factor fundamental en los vehículos aéreos no tripulados. Por ello, es esencial entender qué tipos de uso de GNSS existen y sus funciones. Dependiendo tanto de las características como de las funciones del UAV, será más conveniente utilizar de un modo u otro el Sistema Global de Navegación por Satélite (GNSS). Comúnmente llamado GPS .
A continuación, hablaremos de las diferentes arquitecturas de uso de GNSS y sus aplicaciones en los UAVs. Las más importantes a destacar son las siguientes:
Posicionamiento RTK GPS/GNSS
En el modo RTK (Real Time Kinematic) el UAV o Dron calcula su posición en relación con la ubicación de la posición de la Base (GCS). La estación base envía correcciones al módulo GPS/GNSS de aire. Esto permite mejorar la precisión relativa entre ambos dispositivos, eliminando los errores introducidos por la atmósfera y otros factores. Con el posicionamiento RTK activado la precisión relativa mejora hasta el grado de centímetros. Según las necesidades de la operación, el posicionamiento RTK puede estar activado durante todo el vuelo o automatizarse para que el dron comience a recibir correcciones RTK cuando entre en una fase de vuelo crítica. Un ejemplo puede ser la fase de aterrizaje. Asegurándonos una precisión de centímetros a la hora del touch point (en caso de alas fijas), aterrizar sobre un punto exacto (en caso de multirrotores) o activar modos avanzados (en caso de aterrizaje en red o vehículos en movimiento).
Una de las aplicaciones con drones que le sacan más partido a este tipo es la fotogrametría. La fotogrametría para drones posibilita modelar una superficie en 3D, crear planos y realizar mediciones. Por ello, alcanzar una gran precisión es un factor fundamental. Las posiciones de la cámara del dron con RTK se calculan en tiempo real. Esto permite corregir posiciones de la cámara de escasos centímetros de precisión, tanto vertical como horizontalmente.
GNSS Compass Moving Base
Con este método, se puede estimar la actitud y orientación de un vehículo en movimiento sin la necesidad de utilizar un magnetómetro u otro tipo de sensores sensibles a interferencias electromagnéticas. Para ello, se utiliza el posicionamiento relativo de un mínimo de dos antenas GNSS (GPS, Glonass & BeiDou) dada una posición relativa conocida entre ellas. La estación de referencia y los receptores móviles pueden moverse mientras se calcula un vector preciso entre las antenas de los receptores. Calculando tanto la posición como la actitud del vehículo en base a la señal GPS.
Este modelo se utiliza frecuentemente en helicópteros con el fin de conseguir redundancia con el magnetómetro. Un ejemplo de pérdida de orientación sucede en las proximidades de torres de alta tensión. Ya que la presencia de interferencias electromagnéticas interfiere en la medida de los magnetómetros.
GNSS Compass Static Base
Las correcciones para la orientación de la plataforma nos las da una estación base fija. El sistema de aviónica incorporado en el UAV o Dron se puede configurar para utilizar coordenadas previamente medidas de la posición de la antena en la base. Esto garantiza una mejor posición absoluta al dron. Conociéndose los dos vectores entre base y cada una de las antenas del UAV, el sistema de aviónica calcula el vector entre las dos antenas de aire.
Un uso frecuente es en el aterrizaje en plataformas móviles como puede ser en barcos. Al comunicar las correcciones de orientación mediante la base fija, la precisión de la plataforma móvil obtenida es mayor.
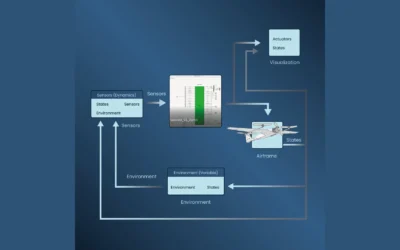
Integración de estos tipos de uso de GNSS en Veronte Autopilot 1x
Todos estos tipos de uso de GNSS pueden ser utilizados en el Veronte Autopilot 1x sin necesidad de integrar ningún hardware adicional. El Veronte Autopilot 1x cuenta con doble sensor GNSS (GPS, Glonass & BeiDou) tanto en tierra como en aire y se pueden activar desde el software Veronte PIPE. La activación se realiza de una manera sencilla con los wizard creados para los diferentes escenarios tal y como podemos ver en el manual de usuario.
En Embention disponemos de un equipo entorno a 50 ingenieros, invirtiendo continuamente para incorporar a nuestros sistemas la última tecnología. Un sistema de navegación como el que usamos en el Veronte Autopilot 1x puede proporcionar a los usuarios información sobre la posición y actitud del dron o cualquier otro vehículo en movimiento con gran exactitud independientemente del lugar y climatología.