Obtaining the most accurate information about the UAV position and attitude anywhere in the world and in all weather conditions is a fundamental factor in unmanned aerial vehicles. Therefore, it is essential to understand what types of advanced GNSS uses systems exist and their functions. Depending on both the characteristics and functions of the UAV, it will be more convenient to use one way or another the Global Satellite Navigation System (GNSS), commonly called GPS.
Next, we will about the different GNSS uses architectures and their applications in UAVs. The most important to highlight are the following:
RTK GPS/GNSS Positioning
In RTK mode (Real-Time Kinematic) the UAV or Drone calculates its position in relation to the Base position location (GCS). The base station sends corrections to the GPS/GNSS air module. This allows improving the relative accuracy between both devices, eliminating the errors introduced by the atmosphere and other factors. With RTK positioning activated the relative accuracy improves until to the centimeters scale. Depending on the operation needs, RTK positioning can be activated during the entire flight or automated so that the drone starts receiving RTK corrections when it is in a critical flight phase. An example could be the landing phase. Ensuring a centimeters accuracy at the touchpoint time (in fixed wings cases), landing on an exact point (in multirotor cases) or activate advanced modes (in case of landing on a network or moving vehicles).
One drone application that takes advantage of RTK mode is photogrammetry. Photogrammetry with drones makes possible to model a 3D surface, create plans and perform measurements. Therefore, achieving high accuracy is a fundamental factor. Drone camera positions with RTK are calculated in real-time. This allows correcting camera positions of a few precision centimeters, both vertically and horizontally.
GNSS Compass Moving Base
With this method, the attitude and orientation of a moving vehicle can be estimated without the need to use a magnetometer or other sensors sensitive to electromagnetic interferences. For this, it is used the relative positioning of a minimum of two GNSS antennas (GPS, Glonass & BeiDou) given a known relative position between them. The reference station and mobile receivers can move while is calculating a precise vector between the receiver antennas. Calculating both the position and the attitude of the vehicle based on the GNSS signal.
This model is frequently used in helicopters in order to achieve magnetometer redundancy. An example of loss orientation is in the vicinity of high voltage towers. Since the electromagnetic interference presence interferes with the magnetometers measurement.
GNSS Compass Static Base
The corrections for the platform orientation are given by a fixed base station. The avionics system incorporated in the UAV or Drone can be configured to use previously measured coordinates of the antenna position at the base. This guarantees a better absolute drone position. Knowing the two vectors between the base and each UAV antennas, the avionic system calculates the vector between the two air antennas.
Frequent uses are on landing on mobile platforms such as ships. When communicating orientation corrections through the fixed base, the accuracy of the mobile platform obtained is greater.
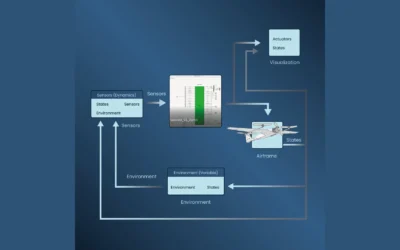
Integration of these types of GNSS use in Veronte Autopilot 1x
All these types of GNSS use can be used in Veronte Autopilot 1x without the need to integrate any additional hardware. Veronte Autopilot 1x has a double GNSS sensor (GPS, Glonass & BeiDou) both on the ground and in the air and can be activated from Veronte PIPE software. The activation is done in a simple way with the wizard created for the different scenarios as we can see in the user manual.
In Embention we have a team of 50 engineers, continuously investing to incorporate the latest technology into our systems. A navigation system like the one we use in Veronte Autopilot 1x can provide to users information about the position and attitude of the drone or any other moving vehicle with great accuracy regardless of location and weather.