

Autopilot 1x
Sensor Redundant Control System
Miniaturized flight control system advanced control of autonomous vehicles. Developed in accordance with aviation standards DO178C / ED12, DO254 /ED80 and DO160, it embeds sensors, LOS and BLOS datalink and remote ID / ADS-B.
Autopilot 1x
Sensor Redundant Control System
Miniaturized flight control system advanced control of autonomous vehicles. Developed in accordance with aviation standards DO178C / ED12, DO254 /ED80 and DO160, it embeds sensors, LOS and BLOS datalink and remote ID / ADS-B.
Any Vehicle

Model Based Design

Certification Datapack

GNSS-Attitude

Cloud Connectivity
Autonomous Control
Fully Autonomous Vehicle Operation
User Programmable
Model Based design tools available for the generation of custom control laws, navigation algorithms, automatic routines or any other autonomous vehicle needs. Custom C++ code can also be loaded for advanced performance.
Drone certification
Being the core of the first RPAS type certificate in Europe, Veronte Autopilot counts with a certification datapack for proving DO178C / ED12, DO254 / ED80 compliance up to DAL B (DAL A ongoing). DO160 and MIL-STD-810 test reports are also available.
Sense & Avoid
The embedded avoidance algorithms automatically modify the route in real time to avoid nearby obstacles. The embedded ADS-B or Remote ID is in charge of the detection function. Other external modules based on vision, radar are also compatible.

Any Vehicle
Cloud Connectivity
Model Based Design
GNSS-Attitude
Certification Datapack
Autonomous Control
Fully Autonomous Vehicle Operation
User Programmable
Model Based design tools available for the generation of custom control laws, navigation algorithms, automatic routines or any other autonomous vehicle needs. Custom C++ code can also be loaded for advanced performance.
Drone certification
Being the core of the first RPAS type certificate in Europe, Veronte Autopilot counts with a certification datapack for proving DO178C / ED12, DO254 / ED80 compliance up to DAL B (DAL A ongoing). DO160 and MIL-STD-810 test reports are also available.
Sense & Avoid
The embedded avoidance algorithms automatically modify the route in real time to avoid nearby obstacles. The embedded ADS-B or Remote ID is in charge of the detection function. Other external modules based on vision, radar are also compatible.
Any Vehicle
The flexible architecture in Veronte Autopilot makes it suitable for all kinds of vehicle layouts. Custom control phases, actuator mixing, smooth phase transitions, etc. can be configured to fit any flying or surface autonomous vehicle layout.

Fixed Wing

VTOL

Multirotor

Blimp

Helicopter

Parafoil

Gyrocopter

UGV

Target (UAT)

USV
Any Vehicle
The flexible architecture in Veronte Autopilot makes it suitable for all kinds of vehicle layouts. Custom control phases, actuator mixing, smooth phase transitions, etc. can be configured to fit any flying or surface autonomous vehicle layout.
Fixed Wing
Multirotor
Helicopter
Gyrocopter
Target (UAT)
VTOL
Blimp
Parafoil
UGV
USV
User Programmable
Advanced configuration options are available so the integrator has full access to customize the autopilot performance. Failsafes, automatic routines, programs, control phases, control channels, navigation, guidance, etc. can be built by the user from zero.

Model Based Design
It uses a Simulink-like interface to generate programs for GNC or other purposes.

Custom C++ Code
Import custom C++ to the autopilot hardware and use it as a program block.

Automatic Rutines
Create events and actions and associate them to ensure 100% autonomous control.
User Programmable
Advanced configuration options are available so the integrator has full access to customize the autopilot performance. Failsafes, automatic routines, programs, control phases, control channels, navigation, guidance, etc. can be built by the user from zero.
Model based design
It uses a Simulink-like interface to generate programs for GNC or other purposes.
Custom C++ Code
Import custom C++ to the autopilot hardware and use it as a program block.
Automatic rutines
Create events and actions and associate them to ensure 100% autonomous control.
Safety & Certification
Embention is a pioneer in certification for drones and eVTOL aircraft.
DO178C / ED12 & DO254 / ED80
DO160 & MIL-STD-810 Environmental Tests
Manufacturing and ESS

Safety & Certification
Embention is a pioneer in certification for drones and eVTOL aircraft.
DO178C / ED12 & DO254 / ED80
Designed according to “Software Considerations in Airborne Systems and Equipment Certification” and “Design Assurance Guidance for Airborne Electronic Hardware” with DAL B compliance, Certification Datapak includes evidence needed for drone certification.
DO160 & MIL-STD-810 Environmental Tests
Environmental qualification tests on the Veronte Autopilot are passed for vibrations, temperature, altitude, humidity, EMI /EMC. It ensures hardware reliability and provides reliability evidence to pass a drone airworthiness certification.
Manufacturing and ESS
All units produced pass a strict validation process. It includes tests for all components (I/O, sensors, etc.) whose results are saved in the ATR (Acceptance Test Report). Final tests include ESS (Environmental Stress Screening) to discard potential damages.
State Of The Art Autopilot
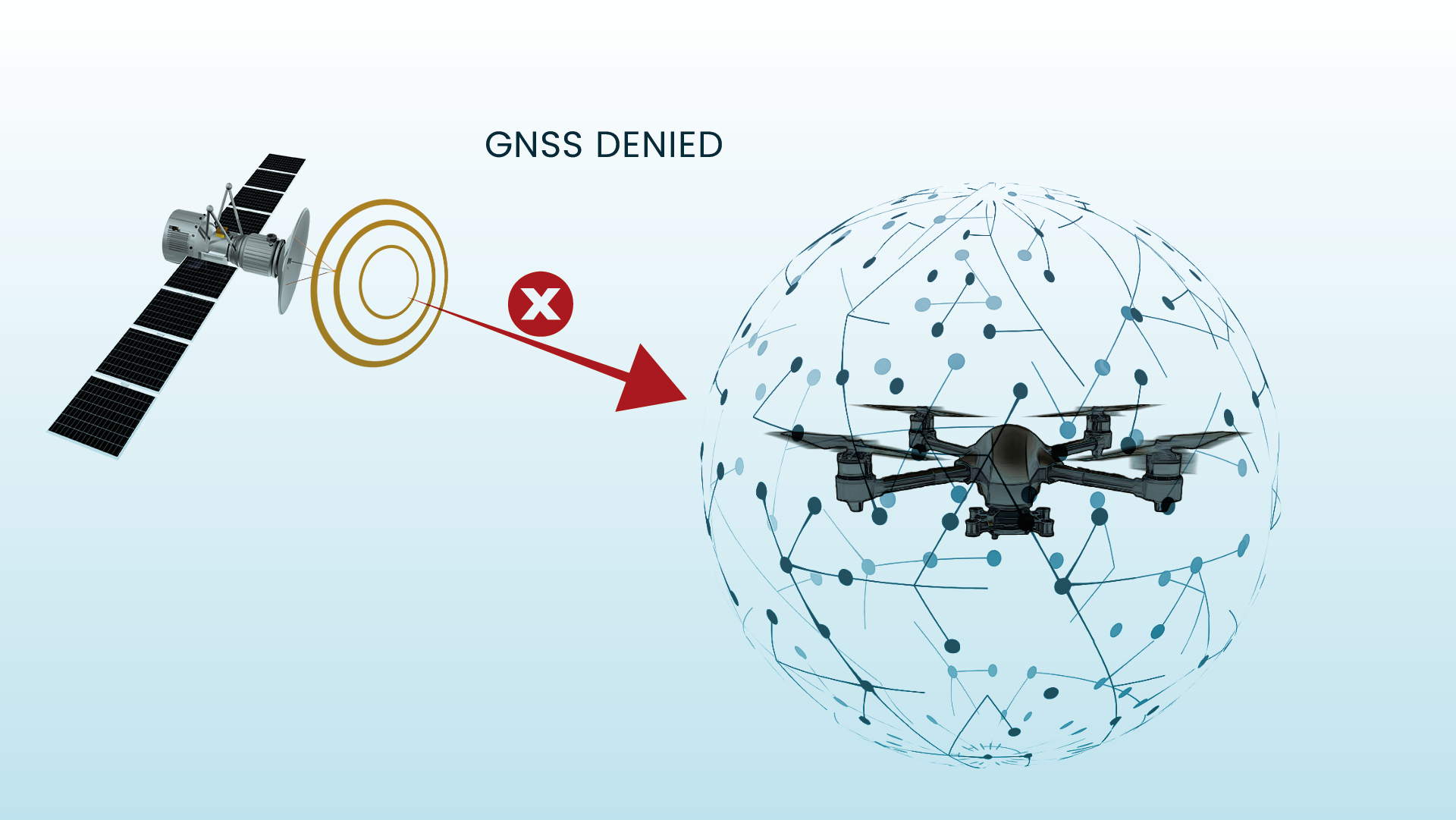
GNSS Denied Navigation
GNSS denied navigation merges sensor data together with wind estimation in order to minimize the position drift during the GNSS failure. External sensors such as vision based navigation or advanced positioning systems can be easily integrated.

Geofencing & Geocaging
Veronte Autopilot complies with the latest regulations for geofencing and geocaching. It permits to ensure that the drone will always fly within the approved areas and never will get into zones not approved for drone flights.

Cloud Connectivity (BLOS)
It can be operated Beyond Line Of Sight by controlling the drone through the internet. This BLOS connectivity can be achieved with the internal 4G module or by installing an external Satcom or LTE module. Designed for fleet management and UTM.
Peripheral Compatibility
Veronte Autopilot is agnostic to the external peripherals. The configuration tools permit connecting any external device.









Peripheral Compatibility
Veronte Autopilot is agnostic to the external peripherals. The configuration tools permit connecting any external device.


All In One Box
Internal ADS-B Or Remote ID
All In One Box
The miniaturization effort in Veronte Autopilot permits to concentrate all elements required for drone control in a reduced box with a weight of only 198g. Advanced redundant sensors (IMU, GNSS, Barometer, etc.) are contained within the autopilot. The high performance sensors include advanced functionalities such as RTK differential GNSS or GNSS heading estimation.
Internal ADS-B Or Remote ID
Also, the Veronte Autopilot can install a DAA module, options are available for ADS-B (1W) or for Remote ID (WIFI + Bluetooth). Both modules include IN and OUT features so it can be used for broadcasting drone position or for reading the position of other aircraft nearby in order to enable the collaborative sense and avoid functionality.
3D Model
Size: 44mm x 64mm x 75mm
Weight: 198g | 210g + ADS-B/Remote ID
Temperature range: -40 to 60ºC
Advanced Perfomance
More than 15 years experience in drone autopilot development are concentrated in Veronte Autopilot for including outstanding features.
Moving Platforms
Simultaneous Operation
GNSS Attitude
Control Phases & modes
Communications
Fly-by-camera
Curve-Navigation
RTK Positioning
Adaptive Control
Aircraft Data Recorder
Rendimiento Avanzado
Más de 15 años de experiencia en el desarrollo de autopilotos para drones se concentran en Veronte Autopilot, incluyendo características destacadas.
Moving Platforms
Simultaneous Operation
GNSS Attitude
Control Phases & modes
Communications
Fly-by-camera
The interface with a gimbal camera permits the fly-by-camera functionality so the camera operator can control the flight of the drone by just pointing the camera. When enabled, the drone will fly in the direction of the camera pointing, it can be configured for maintaining the flight altitude or to descend as per the camera pointing.
Curve-Navigation
RTK Positioning
Adaptive Control
Aircraft Data Recorder
Specifications
| All Vehicles | Plane | Multi | Heli | Autogiro | VTOL | USV | + |
| 100% Autonomous | Mission & payload | Assisted | Manual | Auto |
| Advanced Control | Adaptative | Curve-based | Fly-by-camera |
| Sense & Avoid | Radar | Lidar | Camera | ADS-B | Remote ID |
| All-in-one Box | Sensors | FTS | Comms | ADS-B or Remote ID |
| Internal Sensors | 3x IMU | 3x Magneto | 2x Barómetro | 1x Pitot |
| Positioning | 2x GNSS | RTK | GNSS Heading |
| Programs | Model based design |Customization |PID level |
| Phases | Takeoff | Landing | Cruise | Hover | Transition | + |
| Automations | Failsafe | Phase change | Operation | Payload |
| Navigation | Sensor mix | Kalman filter | External sensors |
| Pheripherals | Gimbal | ADS-B | Altimeter | Cameras | Others |
| Compatibility | Custom protocols | Mission computer |
| Ports | 16x PWM/GPIO | 5x ADC |
| Buses | 2xCAN | 1xI2C | 1xRS232 | 1xRS485 | 1xUART |
| Expandible | Veronte CEX | Up to 32 actuators |
| Internal LOS | 2,4Ghz | 100mW | Configuration | Tuning |
| Internal BLOS | LTE | Cloud communications | Worldwide |
| External | LOS | Satcom | 4G/5G |
| Certification Ready | DO178C | DO254 | DAL-B | DO160 |
| Failsafe | Dissimilar supervisor | FTS |
| Protections | ESD, Overtemperature, Short Circuit, RP |
| Robust Manuf. | ATR, DDP & DoD | ESS & Calibration in all units |
| Power Input | 6,5 – 36VDC | 5 – 15W | Redundant power input |
| Construction | Anodized aluminium | IP67 |
| Temperature | -40 to 60ºC |
| Weight | 198g | 210g including ADS-B/Remote ID |
Price
| 1x – w/o DAA 4.8 | 5900€ |
| 1x – Remote ID 4.8 | 6150€ |
| 1x – ADS-B 4.8 | 7000€ |
| 1x Integration Kit – w/o DAA 4.8 | 8900€ |
| 1x Integration Kit – Remote ID 4.8 | 9100€ |
| 1x Integration Kit- ADS-B 4.8 | 9850€ |
| 1x Developer Kit – Remote ID 4.8 | 18000€ |
| 1x Developer Kit – ADS-B 4.8 | 18750€ |