Cada vez estamos más y más cerca de la integración de lo que hoy conocemos como UTM (Unmanned Aircraft Systems Traffic Management) con el actual ATC (Air Traffic Control) en lo que constituirá una simbiosis perfecta que implicará la integración de los vehículos autónomos en el espacio aéreo controlado.
A pesar de que en la actualidad todavía no existe un estándar o normativa específica respecto a cómo sucederá esta integración, en Embention, siendo fieles a nuestra política de facilitar y acelerar la irrupción de los drones en el espacio aéreo, hemos decidido promover una serie de acciones y medidas encaminadas a facilitar esta integración. Estas acciones por supuesto han sido ideadas, planeadas y llevadas a cabo por expertos cualificados y de referencia en esta materia.
ADS-B
Veronte Autopilot integra un dispositivo ADS-B interno opcional. Este equipo cuenta con módulos tanto de emisión como de recepción ADS-B, permitiendo una integración total con otros vehículos aéreos en un entorno colaborativo.
Gracias al módulo de recepción, el autopiloto Veronte es capaz de identificar otras aeronaves cercanas equipadas con ADS-B, recibir información relativa a éstas y mostrársela al operador de control de vuelo, de modo que pueda monitorizar la operación y desviar la aeronave de su ruta en caso de que sea conveniente para evitar, por ejemplo, una colisión. En el supuesto de que no se llevara a cabo ninguna acción por parte del operador, el autopiloto generaría de manera automática un área de repulsión rodeando las aeronaves de modo que el autopiloto ejecute maniobras de evasión automáticas en caso de riesgo de colisión.
El módulo de transmisión emite la posición del dron de acuerdo al estándar ADS-B, de modo que este pueda ser detectado por otras aeronaves, así como por los centros de control ATC / UTM monitorizando el espacio aéreo.
Además, el autopiloto es compatible con módulos ADS-B y Transponder externos, como pueden ser los de Aerobits, Sagetech o uAvionix. Esto dota al sistema una flexibilidad total pudiendo así utilizarse dispositivos de distintas características y frecuencias.
Veronte Cloud
A fin de lograr una mayor integración en el espacio aéreo, se prevé que existan centros públicos de datos en la nube conteniendo información del tráfico aéreo así como de otros datos de interés como puedan ser condiciones climáticas o zonas de vuelo restringido.
Embention ha desarrollado sus propios servidores en la nube para drones (Veronte Cloud). Estos permiten gestionar y almacenar el tráfico de datos de los autopilotos que activen esta funcionalidad, a la vez que puedan conectarse con servidores externos para intercambiar información del tráfico aéreo.
La conexión entre el dron y Veronte cloud puede hacerse de tres maneras diferentes. La primera sería utilizando el módulo 4G integrado en el autopiloto, lo cual le dará una conexión directa con la nube a través de la infraestructura de telefonía móvil.
En la segunda, utilizaríamos una radio LOS (Line Of Sight) entre el dron y la estación de control, una vez los datos alcancen la estación de control estos se envían a la nube a través de una conexión a internet en la GCS.
La tercera implicaría una conexión vía satélite a través de un módulo externo SatCom. Esta conexión se realizará normalmente vía un módulo Iridium o Inmarsat en el drone e implica tener acceso a Internet en tierra o bien, tener instalado un segundo módulo satelital.
Sense & Avoid
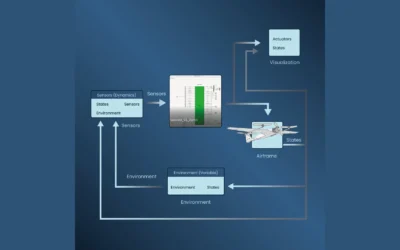
Estos sistemas ADS-B y UTM se enmarcan dentro de un entorno de operación colaborativo, donde se asume que todos los drones van a compartir su posición para evitar colisiones y permitir una gestión efectiva del tráfico aéreo no tripulado. Esto no siempre es suficiente ya que podemos lógicamente encontrarnos con obstáculos aéreos no dotados con sistemas ADS-B, como pueden ser pájaros o drones no colaborativos.
Así pues, para garantizar la integración eficaz de los drones en el espacio aéreo, es necesario integrar sistemas que permitan la detección de este tipo de obstáculos. Para ello, Veronte Autopilot es capaz de integrarse con una amplia variedad de sensores radar o con sistemas de visión artificial. Estos dispositivos transmiten la información (posición, velocidad, tamaño…) del obstáculo al autopiloto, de modo que este genere una conciencia del entorno que le rodea.
A fin de realizar la evasión, Veronte Autopilot incluye algoritmos basados en campos de fuerza de atracción y repulsión. Ante la detección de un obstáculo el autopiloto generará un campo de fuerza conteniendo el obstáculo que desviará al dron de su ruta predefinida, en caso de ser necesario, a fin de evitar la colisión y volver a la ruta predefinida a la mayor brevedad posible.
Otras maniobras pueden ser configuradas en el drone en función de la misión o del entorno de operación. Un ejemplo ampliamente utilizado sería el de detener completamente el dron hasta que la situación de riesgo desaparezca o realizar una maniobra evasiva incrementando el nivel de vuelo y continuando con la misma trayectoria.
Certificación
El Autopiloto Veronte está diseñado y desarrollado según el estandar DO254 (Design Assurance Guidance for Airborne Electronic Hardware) y el software embarcado cumple con el estándar DO178C (Software Considerations in Airborne Systems and Equipment Certification). El cumplimiento con estos estándares de calidad, permite garantizar un alto nivel de fiabilidad del sistema, disponiéndose en este sentido, de un Datapack de certificación para drones donde se contiene toda la información referente al desarrollo y a los ensayos realizados en el hardware y en el software.
Veronte no es un autopiloto profesional más, Veronte se anticipa al futuro integrando sistemas de seguridad y control para un porvenir en donde drones y humanos conviven en perfecta armonía y equilibrio.
Veronte autopilots, Enabling Drones To Populate Our Skies!