We are more and more close to the integration of what we know as UTM (Unmanned Aircraft Systems Traffic Management) into the current ATC (Airs Traffic Control), in what will constitute a perfect simbiosi of the autonomous vehicles within the controlled air space.
Despite not being at present any standard or specific regulations about how this integration will be carried out, in Embention, being faithful to our policy of making easy and accelerating the appearance of the drones in the airspace, we have decided to promote concrete actions and measures to make this integration easier. These actions have obviously been thought, planned and executed by the most qualified experts in this field.
ADS-B
Veronte autopilot integrates an optional internal ADS-B module. This equipment counts on both transmitter or receiver ADS-B modules, enabling a perfect integration with other aerial vehicles in a collaborative environment.
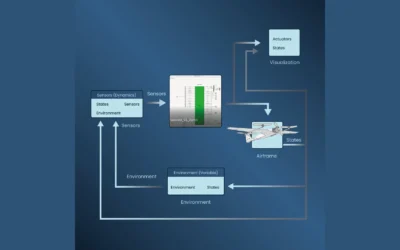
Thanks to the receiver module, the Veronte Autopilot is capable to identify other near aircrafts equipped with ADS-B, to receive information related to them and show it to the flight operator, being this one able to monitorize the operation and turn off the aircraft to avoid, for example, a collision. Just in case the operator does not carry out any action, the autopilot will generate a repulsion area around the aircrafts making the platform to avoid them automatically when there is risk of collision.
The transmitter module sends the position of the drone according to the standard ADS-B, in the way that it might be detected for other aircrafts, as well as for the control centers ATC/UTM monitoring the airspace.
Furthermore, the autopilot is compatible with external ADS-B and Transponder modules like the ones from Aerobits, Sagetech or uAvionix. This gives the system a great deal of flexibility being able to work with different devices with different features and frequencies.
Veronte Cloud
In order to get a greater integration in the airspace, it is foreseen the creation of public data centers in the cloud containing air traffic information as well as other interesting data like the weather conditions or restricted flying areas.
Embention has developed its own cloud servers for drones (Veronte Cloud). These allows to manage and store the data traffic of those autopilots with this function while they can connect to external servers to exchange information about the air traffic.
The connexion between the drone and Veronte Cloud can be done in three different ways. The first one would be by using the embedded 4G module, which will provide a direct connexion with the cloud through the mobile phone infrastructure.
The second one would be to use a LOS radio (Line of Sight) between the drone and the control station, and once the data arrives at the control station, it is forwarded to the cloud via an Internet connection on the drone GCS.
Sense & Avoid
These ADS-B systems are framed into a collaborative operation environment, where it is assumed that all the drones are sharing their position to avoid collisions and allow an effective management of the unmanned air traffic. This is not always enough since we can logically find other aerial obstacles without ADS-B systems, like birds or non collaborative drones.
Therefore, in order to guarantee the effective integration of the drones in the air traffic, it is necessary to integrate systems that allow the detection of non collaborative obstacles. For that, Veronte autopilot can be integrated with a wide variety of radar sensors or artificial vision sensors. These devices transmit the information (position, speed, size…) of the obstacle to the autopilot in the way that it generates a conscience of the surrounding environment.
In order to perform the evasive maneuver, Veronte autopilot includes algorithms based on attraction and repulsion force fields. After the detection of an obstacle, the autopilot will generate a force field containing the obstacle which will turn off the drone from its original route, in case it is necessary, in order to avoid the impact and go back to its original route as soon as possible.
Other maneuvers can also be configured on the drone according to the mission or the operative environment. A widely used example would be to stop the drone completely until the risky situation disappears or making an evasive maneuver increasing the flight level and continuing with the same trajectory.
Certification
Veronte autopilot is designed and developed under the DO254 standard (Design Assurance Guidance for Airborne Electronic Hardware) and the airborne software is compliant with the DO178C standard ( Software Considerations in Airborne Systems and Equipment Certification). The compliance with these quality standards, allows to guarantee a high level of reliability in the system. In this sense a drone Certification Data Pack which contains all the information regarding the development and tests made in the software and hardware is available.
Veronte is not one more professional autopilot, it goes beyond integrating safety and control systems for a future where the drones and humans will live together in perfect harmony and balance.
Veronte autopilots, Enabling Drones to Populate our Skies!