La integración de LoLaS (Sistema de Aterrizaje Local) con el piloto automático Veronte 1x ha sido una un completo éxito. Con el fin de apoyar las operaciones precisas y seguras de los drones, Internest proporciona LoLaS, una tecnología de posicionamiento redundante y diferente basada en el ultrasonido y UWB. Embention, el principal proveedor de pilotos automáticos y componentes críticos para drones y la UAM, ha trabajado estrechamente con el equipo de Internest para la integración exitosa de LoLaS con el piloto automático Veronte 1x , asegurando un aterrizaje autónomo seguro y preciso, incluso en plataformas móviles.
LoLaS y el autopiloto Veronte 1x
LoLaS es un sistema integrado basado en componentes de hardware y firmware. Gracias a la fusión de múltiples tecnologías, LoLaS proporciona un posicionamiento preciso y fiable información sin importar la visibilidad, el clima o el medio ambiente.
El Autopiloto Veronte 1x es un sistema aviónico miniaturizado de alta fiabilidad diseñado para control avanzado de drones y vehículos no tripulados. Desarrollado de acuerdo con DO178C & DO254, Veronte 1x incorpora un conjunto de sensores de última generación y procesadores para permitir el vuelo totalmente autónomo de todo tipo de drones.
“La solución de Internest ha sido probada en varias plataformas y en un entorno complejo: de noche, con una situación ventosa hasta de 35 nudos, en plataformas móviles” dijo el director general de Internest Nicolas Sczaniecki. “Embention ha sido capaz de captar todo el potencial del sistema de posicionamiento de Internest permitiendo aterrizajes autónomos de precisión”.
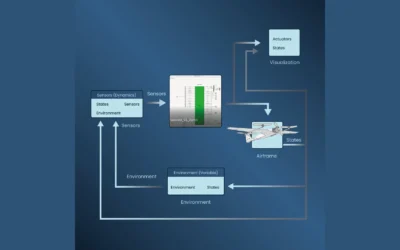
LoLaS se puede usar tres modos diferentes con el piloto Autopiloto Veronte 1x:
- Modo navegación: Se define un peso variable para la entrada del sensor LoLaS dentro del filtro de Kalman. Corrige la posición del GPS o la reemplaza completamente permitiendo un aterrizaje autónomo seguro del GNSS.
- Modo guía: El sensor LoLaS indica la posición relativa entre la base y el dispositivo de a bordo, proporcionando la posición del punto de ruta deseado con alta precisión.
- Modo mixto: Una combinación de ambos, la navegación y la orientación pueden configurarse para mejorar el rendimiento.
“En Embention usamos LoLaS con nuestro Piloto Automático Veronte para proyectos tripulados y no tripulados. Lo hemos usado “boca abajo” para la recuperación y acoplamiento de drones en vuelo y, también, se ha integrado “boca arriba” para el aterrizaje autónomo de precisión en plataformas móviles”, dijo Javier Espuch, Business Manager de Embention.
La integración de LoLaS con el Piloto Automático Veronte 1x lo convierte en la combinación perfecta para proporcionar aterrizajes autónomos seguros en proyectos donde se necesita alta precisión, permitiendo a los drones realizar aterrizajes autónomos incluso en entornos sin GNSS o con interferencias.