Los Vehículos Aéreos no Tripulados (UAVs) se están volviendo – y se volverán – cada vez más comunes en la vida diaria, realizando algunos de los trabajos existentes y creando otros nuevos. Cámaras o gimbals son algunos de los múltiples dispositivos con los que se están equipando los drones. Además cuentan con otros elementos esenciales para el vuelo autónomo como son el autopiloto, GPS o el Controlador de Velocidad Electrónico (ESC) entre otros.
Sin embargo, la heterogeneidad de las unidades de hardware a bordo de los UAVs plantea dificultades de integración que penalizan sus capacidades de misión y vuelo. Por ejemplo, la incapacidad de integrar una cámara determinada teniendo que elegir una más pesada será perjudicial para una misión de fotogrametría, además de reducir la autonomía de vuelo debido al peso adicional.
Can Bus es el protocolo de comunicaciones ideal para sistemas integrados como UAVs. Es un sistema de comunicación versátil y con alto nivel de seguridad que permite ahorrar en peso, tamaño y coste del UAV final.
¿Qué es CAN Bus?
CAN Bus es un protocolo de comunicaciones en serie definido por la Organización Internacional de Normalización (ISO). Originalmente desarrollado por la industria automotriz para reemplazar el cableado complejo que supone un bus de dos cables (paralelo). Es un protocolo basado en mensajes que permiten que sistemas, dispositivos y controladores individuales dentro de una red se comuniquen sin la ayuda de un dispositivo matriz.
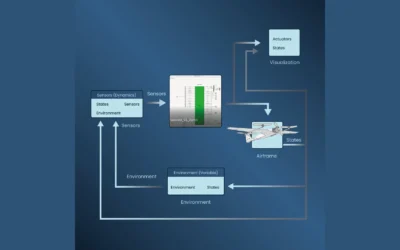
Los dispositivos y controladores conectados al CAN Bus pueden transmitir y recibir los datos del Bus. Un mensaje transmitido por una unidad es recibido por todas las unidades conectadas al Bus. Un mensaje de datos se transmite como una trama. En cada trama, el mensaje está etiquetado por un identificador único en toda la red. Cada unidad tendrá un filtro para aceptar los mensajes relevantes para su funcionamiento.
¿En qué se diferencia de otros buses de comunicación?
CAN Bus funciona a alta velocidad (25 kbps – 1 Mbps), tiene una alta inmunidad a las interferencias eléctricas y dispone de capacidad de autodiagnóstico y reparación de errores de datos. Además, su técnica de arbitraje evita la colisión de datos en función de la prioridad del mensaje. Estas características son la razón del fuerte aumento de la popularidad de CAN en los últimos años.
Las ventajas que ofrece en comparación con otros protocolos de comunicación son:
- Velocidad: es más rápido que otros buses y capaz de enviar múltiples mensajes simultáneamente.
- Flexibilidad: al tener menos cables facilita su instalación y mantenimiento.
- Fiabilidad: necesita muy poco cableado y es menos sensible a la interferencia magnética que el cableado analógico.
- Coste: requiere menos hardware y tiene requisitos mínimos de procesamiento de señal.
CAN Bus en Autopilotos Veronte
Por todas estas razones, los Autopilotos Veronte – simples y redundantes – están equipados con 2 unidades CAN Bus. Los últimos Buses mejoran la versatilidad del autopiloto, ya que la cantidad de fabricantes que añaden CAN Bus a sus sistemas son cada vez más frecuentes. Las comunicaciones CAN también son ideales para nuestras unidades redundantes (DRx), ya que el arbitraje de la unidad activa, cuyo autopiloto simple controla el UAV, se ejecuta a través del CAN Bus.
El futuro de las comunicaciones CAN Bus
Con la industria de los drones a plena capacidad y rápida expansión, aparecerán sistemas cada vez más complejos. Estandarizar la forma en que cada componente se comunica con el siguiente será vital para garantizar la compatibilidad, la capacidad de expansión y la longevidad de la instalación.
CAN Bus es el protocolo de comunicaciones más adecuado para que eso suceda. Es habitualmente utilizado en la industria automotriz, así como en la industria aeroespacial: los datos de los paneles de control de A380 se transportan con solo dos cables al CAN Bus, reemplazando 90 cables impares en los aviones más antiguos. Por lo tanto, es justo suponer que el futuro de la industria de los UAV estará vinculada a las comunicaciones CAN.