What is an IMU?
An Inertial Measurement Unit (IMU) is an electronic device that measures acceleration and rotation using accelerometers and gyroscopes. In drones, IMUs work together with GNSS and other sensors to accurately estimate the position and attitude of the unmanned vehicle and are used as the main positioning sensor in situations in which GNSS signals are unavailable or with interferences.
Inertial Measurement Unit in drones
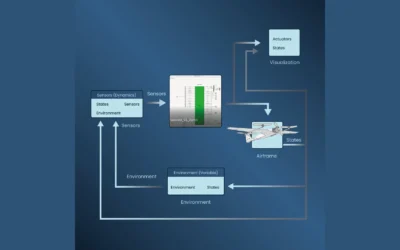
Within the UAV autopilot system, IMUs comprise the suite of sensors used in the Inertial Navigation System (INS). It measures and reports orientation, velocity, and gravitational forces to aid navigation and control using the raw IMU measurements.
It is an essential component in the drone flight control system. It allows drones to operate and fly with maximum control and stability. When the IMU raw data is incorporated into the Kalman filter together with measurements coming from other sensors it outputs navigation data such as:
- Attitude
- Angular rates
- Linear velocity
- Position
How to choose the appropriate IMU
Choosing the right one is not an easy task and there are many aspects we have to take into account. Some of the aspects we have to consider when we have to select an IMU are performance, underlying technology, SWaP (Size, Weight, and Power) and Cost.
Besides, another important factor in UAVs is the ruggedness of the IMU. In harsh UAV applications, vibrations can reach a high level and different temperatures. For that reason, IMUs for UAVs require to be highly rugged to withstand demanding environments.
Advantages of having the correct Inertial Measurement Unit
Tough applications, such as drones, demand extremely stable and high-performance IMUs. An IMU with good performance, vibration robustness, and temperature stability will improve the flight operation with the drone. Making accurate steering even in high vibration situations.
Veronte Autopilot 1x integrates some of the highest-grade IMUs in its category. All three embedded IMU units include two types of sensors: gyroscopes and accelerometers, both with 3 measurement axes. Veronte Autopilot 1x embeds triple redundant IMU and barometer for increased reliability and performance. Furthermore, one of these IMUs includes mechanical vibration isolation while the other two vibrate in solidarity with the autopilot permitting advanced modes in navigation and some features such as RPM rotor estimation in helicopters. Besides, for situations of extreme security, in Embention we have the Veronte Autopilot 4x, incorporating 9 IMUs.
In cases in which a high precision IMU is needed, Veronte Autopilot 1x can interface with external sensors. Veronte Autopilot 1x has been successfully integrated with third-party MEMS and FOG IMU sensors such as VectorNav, iXblue or Inertial Labs for accomplishing certain project requirements such as GNSS denied navigation with UAVs.