In any complex system, being able to test it is an essential part of the development process. Therefore, in the processes of integration and preparation of a drone or eVTOL for the operation phase, many factors must be verified to ensure it is configured correctly. It is in this phase of the process where the ability to simulate the system takes on special value. It is particularly important in the UAS sector, where the success of the mission is critical and the factors involved in the success are countless.
For this reason, having an environment where to control the exposure of the autonomous vehicle system to these factors (in both time and value) is a powerful tool.
Simulation With Veronte Autopilot 1x
Veronte Autopilot 1x has tools for performing two types of UAV simulation. On each case we will need to select the appropriate one according to the drone or eVTOL and the goad of the test:
- HIL simulations (Hardware In the Loop).
- SIL simulations (Software In the Loop).
HIL Simulator
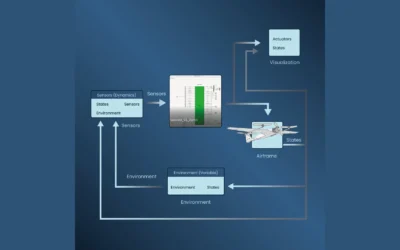
HIL simulations allow simulating specific environments and situations and monitor how it affects to the autopilot solution at any time. It takes into account the response of the real Hardware, its performance, delays or failures in real-time. However, in these simulations, there is no way to control some conditions and states of the environment as well as the time or the performance of everything that depends on the HW. It is precisely in these weaknesses of the HIL where SIL is widely powerful.
Veronte Autopilot 1x has the ability to perform HIL simulations in two different modes, simulating navigation or simulating sensors. Both simulations can be performed with the default environment (Xplane Simulator + Pipe Software + Veronte Autopilot 1x), or with other simulators implementing the necessary communication interfaces.
SIL Simulator
SIL simulations provide the ability to simulate and analyse in detail any situation prior to the operation of the drone or eVTOL. All this without the need for having the real Hardware. Having a model of the system and the possible disturbances that could happen in flight, the power of SIL simulations lies in a great control over all simulation conditions, in addition it adds determinism to the simulations. In other words, system outputs will be identical with the same inputs. Unlike SIL simulations, HIL simulations can block a detailed analysis of the system’s navigation and control algorithms. This is because HW-dependent entries can affect to the system not being possible to control it.
On the other hand, with SIL simulations it is possible to have control of the time during the simulation (stop, restart, etc.). Furthermore, algorithm studies and analysis can be carried out using techniques such as the Monte Carlo Methods. Another factor to keep in mind is that in large projects, access to the hardware is often limited. For this reason, having a simulation tool like Veronte SIL Simulator can make operations design and integration engineers work in parallel, saving time and cost on projects.
Veronte SIL Improvements
Currently, the Veronte Autopilot SIL tool has been updated to the latest version. Incorporating some improvements and the newest code within the Veronte Autopilot.
Updated Veronte SIL Simulator incorporates the 2-processor Veronte Autopilot SW architecture. Enabling Veronte to be the first certified dual-core based autopilot in the market.
In addition, Veronte SIL Simulator is now able to connect with Veronte Pipe Software so autopilot settings can be changed quickly and easily during the use. Support has also been added for the different versions of Hardware. All this makes Veronte SIL a powerful tool to use in the development of drone and eVTOL projects.