An autonomous vehicle is defined as a vehicle capable of sensing its environment and operating without human intervention. That is, the vehicle is capable of detecting the surroundings and making a decision according to its purpose and the data collected. Even if robust avoidance algorithms exist, the certification of a Sense and Avoid solution for eVTOL would require a large investment in terms of time and cost, either because the data gathered by the sensors is not reliable for all flight conditions and environments or because the task involves a high level of risk. In these cases, instead of acting after detecting, the vehicle suggests an evasion maneuver so the operator/pilot can decide how to proceed. This technique is known as “Detect and Suggest”.
Detect and Suggest in eVTOL
In the case of autonomous cars, most of them already capable of operating fully autonomously, even though there must be a pilot onboard responsible for driving. When moving to aerial vehicles, a similar approach will be needed in order to ease the integration of eVTOL in the UAM (Urban Air Mobility).
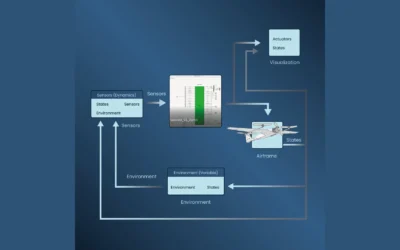
In this case, the process that takes place is Detect and Suggest. It means that the sensors do their work of sensing the environment and the autopilot receives that information and uses it to generate the corresponding obstacle evasion maneuver, but instead of sending this command directly to the actuators, it gives this command information to the operator, who takes the final decision.
In this way the responsibility of the maneuver relies on the operator, permitting to exclude the Sense And Avoid functionalities from the scope of the eVTOL certification.
Advantages of using this Detect &Suggest for eVTOL Certification
Detect and Suggest technique reduces the risk of the autopilot making a wrong (or not the best) decision, hence this responsibility lies on the operator. Obviously, the biggest drawback is that a pilot is needed in order to take the decision in case of obstacle detection but it must not be a major issue when discussing eVTOL for UAM. It is true that the operator needs some skill levels for taking these decisions or even take manual control on obstacle detection but the level of piloting skills required would be lower, as he will be assisted by the autopilot.
The ideal method for Urban Air Mobility
Detect and Suggest is a technique suitable for some specific cases, in which a fully autonomous flight or drive is not the most feasible option due to the existing limitations on detection sensors and the restrictions of existing regulations for eVTOL certification. However, the autopilot can aid the operator with its suggestions and enhance the overall reliability and robustness of the system. That is why this technique is totally suitable for achieving the integration of eVTOL within the controlled air system, that is, Urban Air Mobility (UAM).