There are different strategies that can be followed for the control of Permanent Magnet Synchronous Motors (PMSMs); vector control has shown some advantages over other strategies.
Vectors or scalers
Vector control has notable advantages over traditional scalar controls when it comes to PMSM control. By means of a scalar control you are not controlling the motor exactly, but instead you have a fairly approximate idea of what it is doing and in many cases it is enough. The inverter provides the motor with a voltage and a frequency and the motor responds accordingly.
On the other hand, vector control is based on knowing the position of the motor, which makes it possible to determine the magnetic field necessary to push the rotor in the desired direction (and also do it several thousand times per second). A scalar control would only be able to provide a point of speed for the motor to follow as best as possible, regardless of external factors and / or disturbances.
Generating the magnetic field
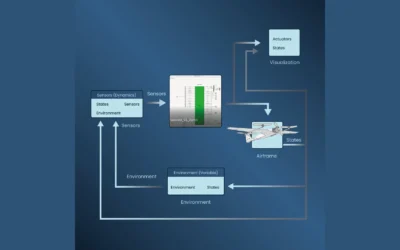
The most important part of vector control is getting the rotor position. That is, in which direction the rotor’s magnetic field is pointing.
The actual direction of the magnetic field is given by the electromotive force (EMF) of the motor which is induced in the stator windings by the magnetic field of the rotor. This EMF will behave as a voltage source connected in series with the rotor resistance / leakage inductance and in parallel with the magnetizing inductance. If the motor parameters are known, it is possible to estimate the value of the EMF. This value is a vector, that is, it has a magnitude and a direction that points in the same direction as the rotor’s magnetic field. This algorithm is commonly called an observer.
Once the magnetic field has been determined, the control part is usually a PI regulator that controls two parameters:
- Torque, controlled by the commanded active current.
- Magnetic field flux, given by reactive current.
But, if the currents of each phase of the motor are dynamic, sinusoidal and time dependent, how can they be controlled with a PI controller? The answer is found in the Clarke and Park transforms that simply move the reference system to place it on the rotor, so that the result becomes two independent scalar components of time ideal to be controlled by a classical controller (such as a PI).
With these little complexities added, a much more precise, efficient and modern control is achieved.
Embention’s vision
Taking this context into account, Embention has launched its new range of MC25KW and MC280 products to the market, implementing high-efficiency FOC control, without the need for extra sensorization. Thanks to this, optimal control and intelligent management of the current used is achieved, allowing adequate consumption for each application.
Furthermore, it is manufactured following a strict manufacturing procedure (ATP), including ESS phases (environmental stress in temperature and vibration) being possible to prove the reliability of the ESC to the authorities, providing calculations of MTBF, ATR (test acceptance reports) , COC (Certificate of Conformity), DO178 (PSAC, SDP, SQAP, etc.) and DO254 (PHAC, HVVP, HTP, etc.)