
Autopilots DRx
Piloto automático redundante distribuido
Diseñado para cumplir los requisitos de certificación eVTOL (DO178C / ED-12, DO254 / ED 80, y DO160) este Piloto Automático Redundante Distribuido es el único controlador de vuelo para fly-by-wire y control autónomo “Ready To Fly” de cualquier aeronave eVTOL para UAM.
Autopilot DRx
Piloto automático redundante distribuido
Diseñado para cumplir los requisitos de certificación eVTOL (DO178C / ED-12, DO254 / ED 80, y DO160) este Piloto Automático Redundante Distribuido es el único controlador de vuelo para fly-by-wire y control autónomo “Ready To Fly” de cualquier aeronave eVTOL para UAM.

Arbitraje redundante

Algoritmo de votado

Redundancia distribuida

Resistente a fallos zonales

Sin un único punto de fallo
Autopiloto redundante distribuido
Controlador de vuelo eVTOL & UAM
Redundancia distribuida
La redundancia distribuida del Autopiloto Veronte DRx permite la instalación de múltiples autopilotos y tarjetas de gestión ubicados en diferentes zonas de la aeronave. Esto lo hace robusto ante fallos zonales. En caso de fallo de un autopiloto o de una zona, otras unidades harán el relevo.
Listo para volar
Con más de 15 años de experiencia en el control de vehículos autónomos, el Autopiloto Veronte está preparado para su instalación en todo tipo de vehículos, incluyendo avión, multirotor, VTOL, etc. Las lógicas de control pueden ser fácilmente definidas por el integrador adaptándose a cualquier disposición.
Certificación para eVTOL
Desarrollado conforme a DO178C / ED12, DO254 / ED80 y DO160 y con redundancia distribuida, cumple los niveles más exigentes de certificación para eVTOL y aeronaves tripuladas (DAL-A en curso). Fácilmente integrable sin perder la conformidad DO.
Arbitraje redundante
Redundancia distribuida
Algoritmo de votado
Resistente a fallos zonales
Sin un único punto de fallo
Autopiloto redundante distribuido
Controlador de vuelo eVTOL & UAM
Redundancia distribuida
La redundancia distribuida del Autopiloto Veronte DRx permite la instalación de múltiples autopilotos y tarjetas de gestión ubicados en diferentes zonas de la aeronave. Esto lo hace robusto ante fallos zonales. En caso de fallo de un autopiloto o de una zona, otras unidades harán el relevo.
Listo para volar
Con más de 15 años de experiencia en el control de vehículos autónomos, el Autopiloto Veronte está preparado para su instalación en todo tipo de vehículos, incluyendo avión, multirotor, VTOL, etc. Las lógicas de control pueden ser fácilmente definidas por el integrador adaptándose a cualquier disposición.
Certificación para eVTOL
Desarrollado conforme a DO178C / ED12, DO254 / ED80 y DO160 y con redundancia distribuida, cumple los niveles más exigentes de certificación para eVTOL y aeronaves tripuladas (DAL-A en curso). Fácilmente integrable sin perder la conformidad DO.
Alta fiabilidad para certificación
Gracias a la redundancia tanto de los autopilotos independientes como de la Junta Directiva, el Autopiloto Veronte DRx ha sido diseñado sin un único punto de fallo, lo que lo hace robusto ante fallos de árbitro, fallos zonales, fallos de bus, etc.

Comunicación Redundante
Autopilot DRX utiliza dos buses de comunicación redundantes para las comunicaciones entre los periféricos, incluido el aislamiento galvánico.

Ningún punto de fallo
El sistema de control de vuelo para eVTOL está diseñado sin un único punto de fallo, garantizando la integridad de los datos y siendo robusto ante fallos zonales.

Control en tiempo real
Incorpora varios microcontroladores para la supervisión en tiempo real. Al detectar una anomalía, aísla el dispositivo evitando la propagación del fallo.
Alta fiabilidad para certificación
Gracias a la redundancia tanto de los autopilotos independientes como de la Junta Directiva, el Autopiloto Veronte DRx ha sido diseñado sin un único punto de fallo, lo que lo hace robusto ante fallos de árbitro, fallos zonales, fallos de bus, etc.
Comunicación Redundante
Autopilot DRX utiliza dos buses de comunicación redundantes para las comunicaciones entre los periféricos, incluido el aislamiento galvánico.
Ningún punto de fallo
El sistema de control de vuelo para eVTOL está diseñado sin un único punto de fallo, garantizando la integridad de los datos y siendo robusto ante fallos zonales.
Control en tiempo real
Incorpora varios microcontroladores para la supervisión en tiempo real. Al detectar una anomalía, aísla el dispositivo evitando la propagación del fallo.
Diseñado para eVTOL
Máxima seguridad y rendimiento del FCS
Todos los tipos de eVTOL
Hecho a medida para eVTOL, cumpliendo a la perfección los estrictos requisitos. Ofrece una flexibilidad excepcional, adaptándose fácilmente a diversas configuraciones de eVTOL, incluidos multicópteros, tailseaters, aviones, VTOL, rotores basculantes o cualquier otra disposición de aeronave.
Configurable por el usuario
La tecnología de diseño basado en modelos y los módulos C++ personalizados permiten adaptar fácilmente el controlador de vuelo a las necesidades de la aeronave. Las fases de control, las transiciones, las rutinas automáticas, los failsafes, etc. pueden modificarse fácilmente sin perder la conformidad con la norma DO178C.
Modos avanzados de control
Personalizable por el usuario. Ofrece configurabilidad para modos de control totalmente personalizados, permitiendo opciones como el control totalmente autónomo o los modos fly-by-wire. También se pueden establecer límites basados en la experiencia del usuario, la geovalla o cualquier otro parámetro.

Diseñado para eVTOL
Máxima seguridad y rendimiento del FCS
Todos los tipos de eVTOL
Hecho a medida para eVTOL, cumpliendo a la perfección los estrictos requisitos. Ofrece una flexibilidad excepcional, adaptándose fácilmente a diversas configuraciones de eVTOL, incluidos multicópteros, tailseaters, aviones, VTOL, rotores basculantes o cualquier otra disposición de aeronave.
Configurable por el usuario
La tecnología de diseño basado en modelos y los módulos C++ personalizados permiten adaptar fácilmente el controlador de vuelo a las necesidades de la aeronave. Las fases de control, las transiciones, las rutinas automáticas, los failsafes, etc. pueden modificarse fácilmente sin perder la conformidad con la norma DO178C.
Modos avanzados de control
Personalizable por el usuario. Ofrece configurabilidad para modos de control totalmente personalizados, permitiendo opciones como el control totalmente autónomo o los modos fly-by-wire. También se pueden establecer límites basados en la experiencia del usuario, la geovalla o cualquier otro parámetro.
Integración UAM & UTM
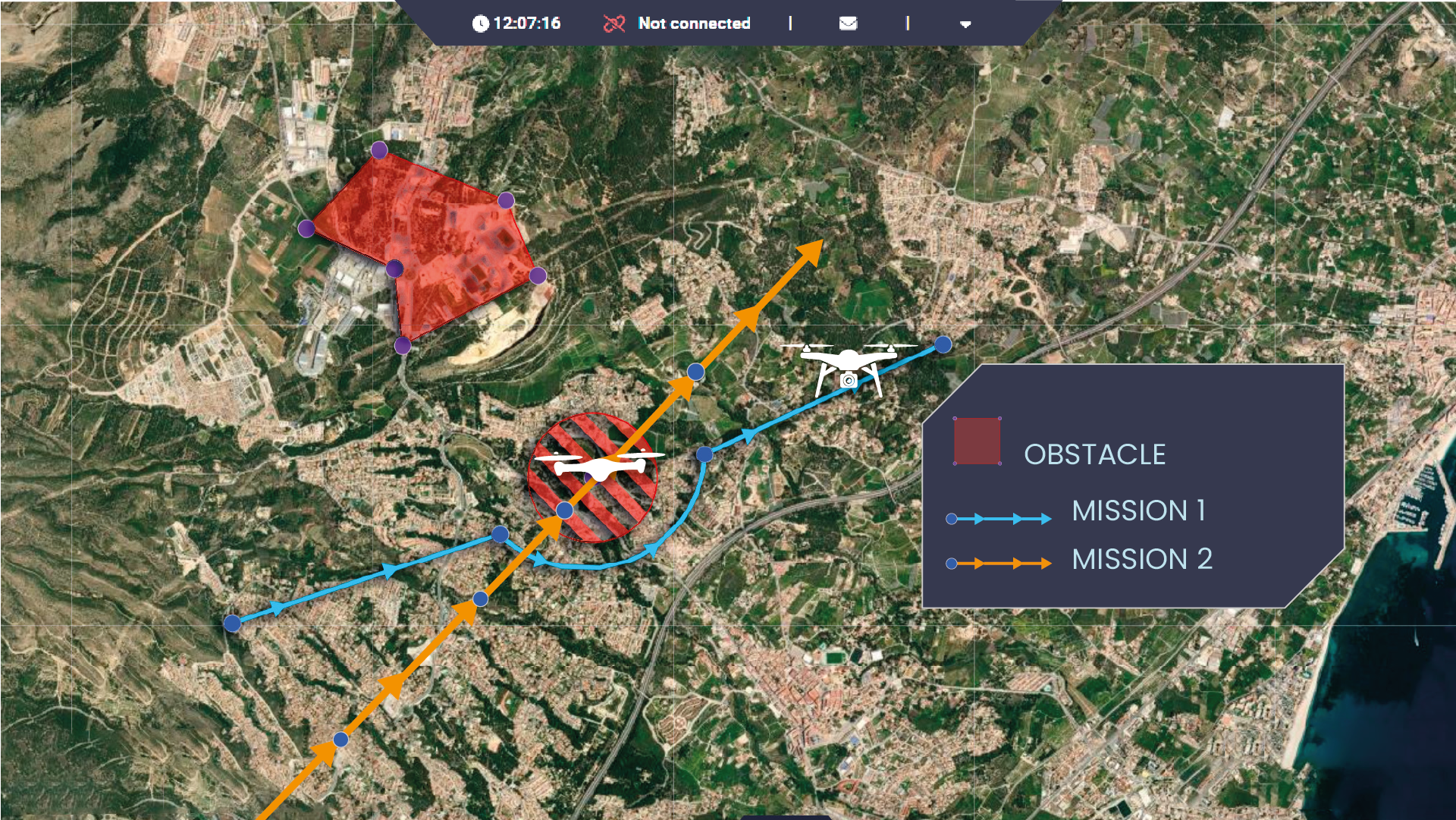
Geofencing / Sense & Avoid
En cumplimiento de la normativa más reciente sobre vehículos voladores autónomos, la delimitación geográfica y la geolocalización permiten restringir las zonas de operación de los vehículos. Esto puede combinarse con las funciones ADS-B, identificación remota, detección y evasión por visión o radar.

Integración en la nube para UTM
La aeronave puede comunicarse fácilmente con la nube mediante la tarjeta eSIM integrada o a través de un módulo externo 4G/5G o Satcom. Permite gestionar de forma remota flotas de eVTOL e interactuar con bases de datos UTM para la integración del espacio aéreo controlado.
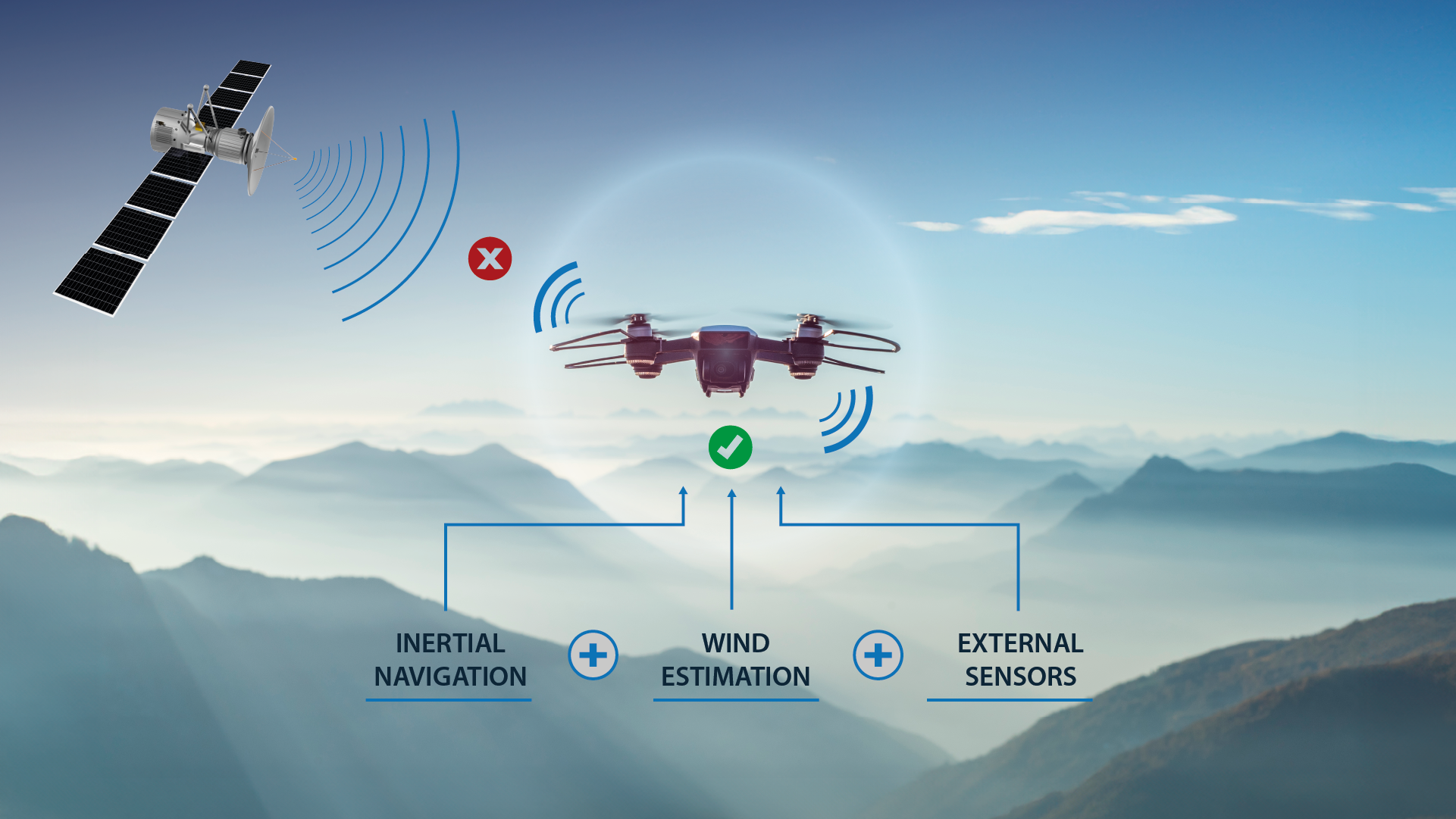
Navegación denegada GNSS
Los algoritmos avanzados de navegación inercial combinan los datos del sensor con la estimación del viento para minimizar la deriva en caso de degradación del GNSS. También puede interconectarse con fuentes de posicionamiento externas para mejorar la precisión de la posición de vuelo en tales eventos.

Control Innovador para eVTOL
Diseñado para el control autónomo y fly-by-wire de aeronaves, con especial atención a las aplicaciones eVTOL. A diferencia de la tecnología de aviación tripulada convencional, prioriza la rentabilidad y está preparado para la integración eVTOL. Además, diseñado para la producción en serie, facilita la escalabilidad y la eficiencia necesarias para que la movilidad aérea urbana prospere, permite que eVTOL pueble nuestros cielos.
Basado en el Autopiloto Veronte
DRx incluye todas las funcionalidades disponibles en el Autopiloto Veronte 1x, además de la fiabilidad adicional que proporciona una arquitectura redundante distribuida. Incluye navegación basada en curvas, ADS-B o Remote ID integrados, sensores internos, algoritmos GNC personalizados, rutinas automáticas configurables por el usuario y un conjunto de capacidades avanzadas para el control autónomo de aeronaves.
Control Innovador para eVTOL
Diseñado para el control autónomo y fly-by-wire de aeronaves, con especial atención a las aplicaciones eVTOL. A diferencia de la tecnología de aviación tripulada convencional, prioriza la rentabilidad y está preparado para la integración eVTOL. Además, diseñado para la producción en serie, facilita la escalabilidad y la eficiencia necesarias para que la movilidad aérea urbana prospere, permite que eVTOL pueble nuestros cielos.
Basado en el Autopiloto Veronte
DRx incluye todas las funcionalidades disponibles en el Autopiloto Veronte 1x, además de la fiabilidad adicional que proporciona una arquitectura redundante distribuida. Incluye navegación basada en curvas, ADS-B o Remote ID integrados, sensores internos, algoritmos GNC personalizados, rutinas automáticas configurables por el usuario y un conjunto de capacidades avanzadas para el control autónomo de aeronaves.