Tras más de quince años de experiencia integrando los autopilotos profesionales, en todo tipo de plataformas UAV, en Embention podemos afirmar que nos hemos enfrentado a todo tipo de configuraciones, fruto en ocasiones, de la imaginación más creativa de sus inventores.
Los vehículos VTOL buscan combinar la alta autonomía de las aeronaves de ala fija con las capacidades de despegue y aterrizaje vertical. En Embention hemos podido comprobar que los drones VTOL híbridos ya no se limitan solo a la combinación de un ala fija con un multirotor sino que existen infinidad de configuraciones. Esto hace necesario que los autopilotos dispongan de una alta capacidad de adaptación para cubrir todos las posibles configuraciones y diseños en drones VTOL.
En la búsqueda de la eficiencia, eficacia, autonomía y versatilidad, a menudo encontramos diseños arriesgados con arquitecturas difíciles de imaginar. A continuación hemos recopilado algunos de los diseños de drone VTOL híbrido más comunes.
Tail Sitters
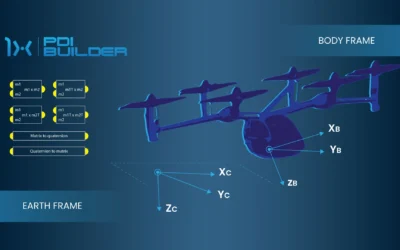
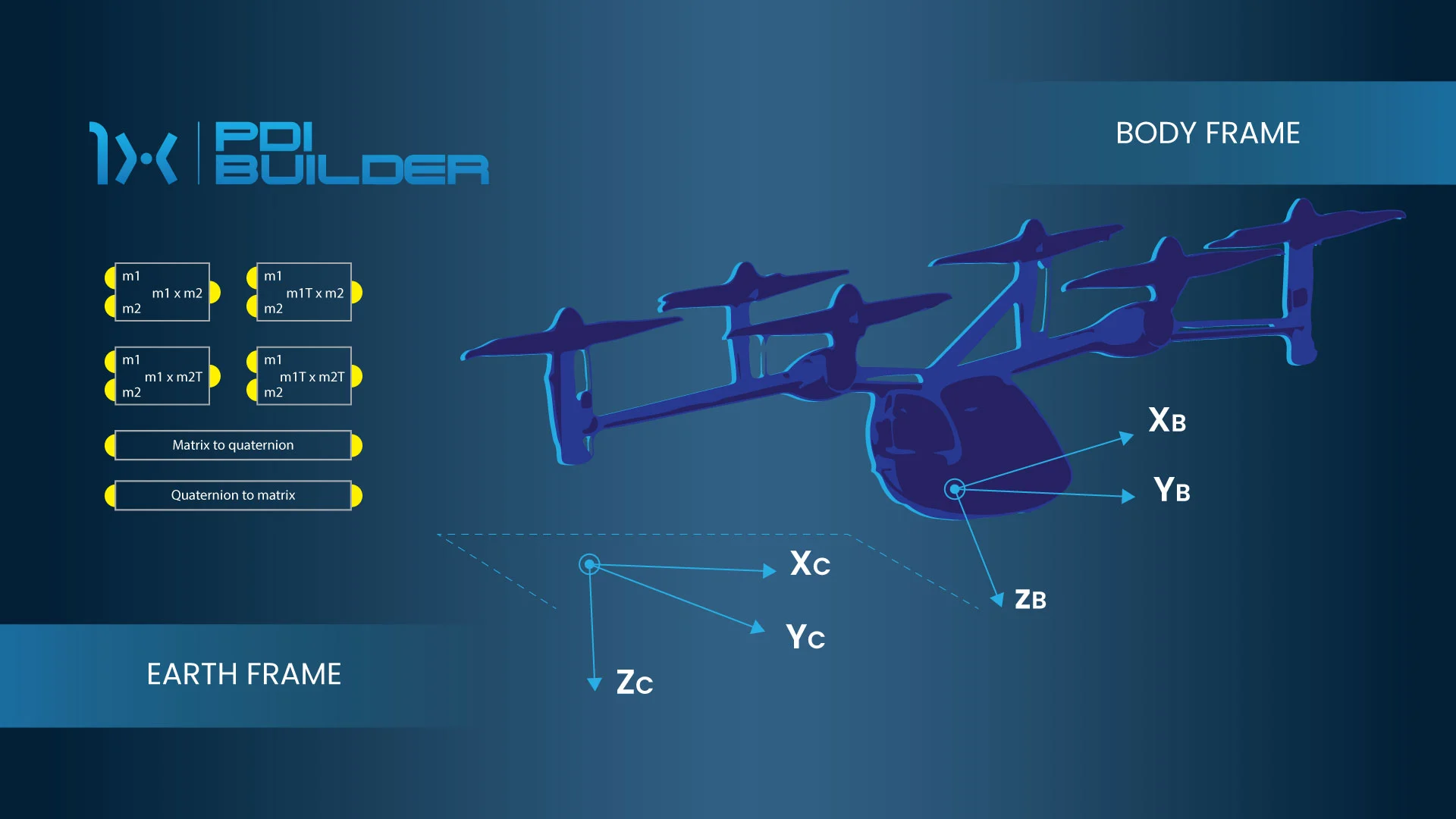
Se trata de plataformas con propulsión trasera tipo “pusher”, que despegan en vertical “como un cohete”, para, una vez en el aire, rotar 90º en busca de la horizontalidad para un vuelo de crucero. La transición entre fases en este tipo de plataformas es especialmente crítica, dada la necesidad de disponer de un estricto control sobre los ejes de referencia en el autopiloto, permitiendo rotarlos en vuelo y adaptándose a las distintas posiciones de la aeronave.
Un buen ejemplo de este tipo de plataformas es el proyecto “Cantas”, de nuestro cliente Checo New Space Technologies.
Multirotor + fixed wing
El híbrido por excelencia, la perfecta simbiosis entre un multirotor y una ala fija con un diseño sencillo. Se trata de una ala fija a la que incorporamos dos brazos laterales y perpendiculares al eje central de la plataforma y en cuyos extremos incorporaremos conjuntos motor/hélice, generalmente eléctricos y con configuración coaxial, para el despegue y aterrizaje vertical. Para asegurar una transición suave entre fases de vuelo, Veronte incorpora un sistema de interfaces completamente configurable por el usuario. En estas fases de transición, tanto los actuadores de vuelo multirotor como los actuadores de ala fija actúan simultáneamente suavizando la transición.
Sirva como ejemplo, el Pelican, de nuestro cliente Dronetech.
Hybrid between helicopter and autogyro
Una arquitectura extravagante y arriesgada, pero altamente eficiente y segura. Si el autogiro o girocóptero ya es un híbrido entre un avión y un helicóptero, dadas sus alas de avión y su rotor principal de helicóptero, imaginemos que además este rotor puede conectarse y desconectarse a/de un motor. En este caso conseguimos un crucero eficaz gracias a la autorrotación del rotor principal, con la versatilidad y capacidad de despegue vertical de un helicóptero. Recordemos que en modo girocóptero, la sustentación se produce por el giro de las palas del rotor principal por autorrotación, que giran gracias al flujo de aire, no debido a la fuerza producida por un motor, por lo tanto el gasto de energía se reduce considerablemente.
El mejor ejemplo: GT20 Gyrotrak de Airial Robotics.
Tilt Motors
Donde los motores propulsan en vertical la plataforma para el despegue y una vez alcanzada la altura requerida, giran sobre su eje 90º adoptando una posición horizontal y de esta forma, propulsando la plataforma hacia adelante. Simple, eficaz, pero añadiendo complejidad al sistema de control, que debe controlar la rotación de estos motores. Requiere pues de un sistema autopiloto de la más alta calidad, fiable, preciso y sobre todo capaz a nivel técnico de llevar a cabo este tipo de transiciones complejas.
Un ejemplo de esta configuración lo encontramos en el vehículo de German Drones.
Tilt Motors
Mismo planteamiento que el anterior, pero en este caso haremos girar el ala completa sobre su eje. No solo los rotores. En el ala tenemos integrados los motores por lo que al girar el ala de vertical a horizontal, realizaremos la transición de despegue a crucero. Este tipo de configuraciones se suele combinar con motores fijos que apoyan al despegue vertical pero también encontramos diseños donde todos los motores se encuentran en el ala y, por lo tanto, rotan.
En este caso la empresa HyFly de Paises Bajos es un buen ejemplo de Tilt Wing con todos los motores instalados sobre el ala.
Es evidente que el cambio de fase en este tipo de plataformas es crítico. Es por ello que en Embention hemos puesto especial atención en dotar a nuestro autopiloto, de las mejores herramientas para garantizar la seguridad de la plataforma durante las transiciones.
Para ello y tal y como hemos comentado anteriormente, no sólo disponemos de interfaces, que permiten un cambio de fase suave y controlado, sino que ofrecemos a nuestros clientes un control absoluto sobre creación de fases de vuelo y sobre el comportamiento de la plataforma en cada una de ellas.
Es por ello que clientes como los arriba citados, han confiado en nuestro autopiloto como sistema de navegación para sus UAV, porque Veronte garantiza una ejecución extremadamente precisa y segura aún en configuraciones avanzadas y plataformas complejas. Veronte siempre va más allá.