Noticias Embention
Mantente actualizado sobre las últimas noticias en las industrias de UAV y UAM. Nuestro equipo está constantemente buscando lo más avanzado en el campo de los drones y vehículos autónomos, por lo que nos complace compartir las noticias más relevantes contigo.

Embention firma un acuerdo estratégico con Amazon Prime Air
Embention ha firmado un acuerdo estratégico con Amazon.com, Inc. para apoyar el programa de entrega con drones de Amazon, Prime Air. El papel de Embention en el proyecto se centra en...
Bloques de operaciones con matrices
En un campo como el de los autopilotos para aeronaves, como es el caso del Autopiloto Veronte, las operaciones con matrices tienen una importancia incuestionable. Se utilizan para...

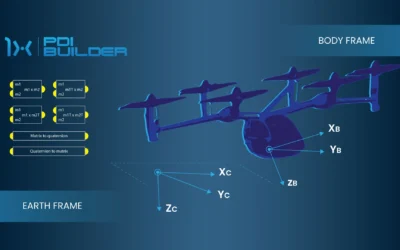
Autopiloto Veronte: Listo para volar y preparado para la producción en serie de eVTOL
El Autopiloto Veronte emerge como una solución altamente optimizada para el control de aeronaves tripuladas de despegue y aterrizaje vertical eléctrico (eVTOL) en previsión de la...
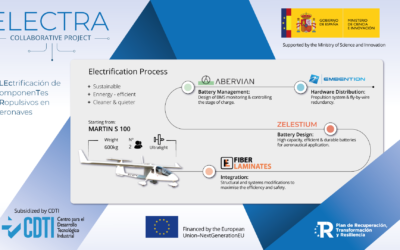
Arranca el proyecto ELECTRA: Innovación para la Sostenibilidad Aeronáutica
En el marco del Programa Tecnológico Aeronáutico de 2023, financiado por el CDTI, las empresas Embention, Fiber Laminates, Zelestium y Abervian, líderes en diferentes aspectos de la...

Por qué necesitamos una rápida evolución de las normas de aviación para UAVs
El mercado de los drones ha experimentado un rápido crecimiento y notables avances tecnológicos en los últimos años. Los vehículos aéreos no tripulados (UAV) han encontrado aplicaciones en...

UAV Solares: La Revolución en Drones Alimentados por Energía Solar
Los UAV solares, también conocidos como drones solares, representan una innovación sin precedentes en el campo de la tecnología de los vehículos aéreos no tripulados. Estos vehículos...

Embention: Líder en Innovación en la I Jornada de Empresarios de Éxito de Jovempa
Reflexiones sobre el Futuro de los Drones El pasado viernes, tuvimos el privilegio de asistir a la I Jornada de Empresarios de Éxito organizada por Jovempa. Nuestro CEO, David Benavente,...

iMEDCAP: un innovador proyecto europeo será pionero en el rescate de soldados heridos en zonas inaccesibles
En diciembre, se inició el proyecto iMEDCAP, financiado por el Fondo Europeo de Defensa. Con un enfoque holístico impulsado por el usuario, el buque insignia iMEDCAP se propone...
Garantía de calidad: cómo aprovechamos la tecnología para la certificación de UAVs
Estableciendo estándares de certificación con herramientas de precisión Embention se erige como pionero en el ámbito de los procesos de certificación, defendiendo el uso de tecnología...
Descubre cómo fue el Dubai Airshow 2023.
La feria del Dubai Airshow 2023, celebrada en DWC, Airshow site, se convirtió en el epicentro de la innovación aeroespacial, atrayendo a líderes de la industria, visionarios y entusiastas...

Nueva alianza en el sector de las aeronaves no tripuladas. Embention y Eanan unen fuerzas por valor de 5 millones de dólares
Embention y Eanan forjan una alianza estratégica para el crecimiento de aeronaves no tripuladas en los Emiratos Árabes Unidos bajo una empresa conjunta con una inversión inicial de 5...

Tecnología IGBT: Control de motor fiable en aeronáutica
La industria eVTOL emergente y la incipiente electrificación de la aviación convencional hace necesario el desarrollo de dispositivos adaptados al control de motores para cubrir las...
BUSCAR
SUSCRIBIRSE
Para recibir noticias y actualizaciones.
SOCIAL
BUSCAR
SUSCRIBIRSE
Para recibir noticias y actualizaciones.