The Veronte autopilot’s versatility and simplicity in its use are one of its main features. Its design allows the integration in a vehicle in a shorter period of a week. The process involves a series of clear-cut tasks that, once completed, provide a fully autonomous platform capable of carrying out complete missions without human interaction.
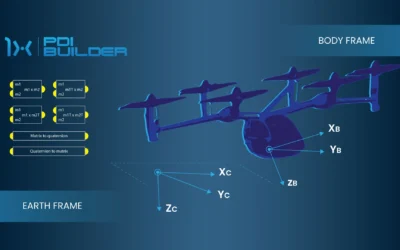
Platform definition
The Veronte Pipe software used to configure the autopilots, already contains a series of settings by default according to the type of platform has been implemented. In addition, the user has a template that contains general values of flight phases or control loops. The only self-contained section for each platform is the one related to the actuators, so its configuration is the first task to be executed within the integration work.
Actuator configuration
The first step in the configuration is to route the cabling of the servos from the platform to the autopilot pins. The servos who control the movements of the aircraft, like all the other external devices that make up the complete system, must be wired according to the 64 pins of the Veronte autopilot.
For the actuators, the first step in the autopilot configuration is the assignment and trimming of them. Depending on the type of platform is being integrated, it will have a number of determined actuators, which must be established within the autopilot control logic.
As an example, in the case of a current wing fixed-wing aircraft would have 5 actuators: an elevator, two spoilers, the tail rudder and the accelerator. On the other hand, for a quadricopter, there would be 4 actuators (the four variators that control the motors speed). They are all created within the configuration and subsequently assigned to the output port by which they will be controlled, according to the wiring previously performed.
With the actuators already defined, the next step is to trim them. Basically, this task consists of relating the value of the signal that arrives at the servos (a PWM pulse) with a physical control magnitude, which is commonly the deflection angle of the control surface on which the servo acts. The objective is that the autopilot “knows what” platform it is controlling, as well as containing in its configuration the relationship between the electrical signal that is sending and the physical action that it causes (certain deflection angle in an elevator, movement of a helicopter dish, increase in the RPM of a combustion engine…).
At this stage, we already have an autopilot containing all the specific control phases for the integrated platform. For example, for a fixed wing: taxi, takeoff, ascent, cruise and landing; in a helicopter: vertical takeoff and landing, cruise and return home. In parallel to the phases, all the actuators have already been wired and configured, so the integration reaches a point where the flight tests are closest.
External devices
Almost all of the integrated platforms contain a number of external devices required to carry out the mission. The configuration of these devices is a part of the integration process, where basically it is necessary to define the interfacing of this device (the autopilot has serial ports, CAN ports or digital connections to make these connections) and the protocol implements them in order to control it from the autopilot.
Control Loops
The previous stage to the real flight would be to establish the gains of the loops that conform the system of control of the platform. For this purpose, algorithms developed by Embention are used to provide approximate values according to the type of vehicle (helicopter, airplane, multi-copter) and characteristics (weight, inertia, power…) of the platform. These parameters are the starting point for the real tests.
Flight test
The final step is the flight test where the control PIDs are adjusted to obtain a stable flight and obtain a platform that follows 100% the commands generated by the autopilot (autonomous flight) or by the pilot (manual or assisted flight).